
基于Taylor级数近似补偿的改进数控振荡器实现
基于Taylor级数近似补偿的改进实现数控振荡器
本文引用地址://m.amcfsurvey.com/article/110914.htm针对CORDIC算法在实现数控振荡器时存在的迭代残余角度误差、尾数舍入误差以及周期性误差的问题,本文提出了基于对这三部分误差补偿的改进实现方法。
周期性误差补偿
由于CORDIC算法的迭代级数有限,旋转产生的角度误差为周期信号,这样周期性误差会引起杂散,为了减少杂散,提高SFDR,在改进的数控振荡器中加入相位抖动模块。
相位抖动(Dither)的作用是在累加器输出加入随机信号,破坏累加相位的周期性。在累加器输出加入随机抖动信号,破坏累加相位的周期性,可以使数控振荡器输出端的杂散信号能够得到抑制。加入抖动模块可以提高SFDR值,但是杂散的抑制是以牺牲整个系统的基底误差(error floor)为代价的。杂散信号得到抑制的同时,信号的整个SNR会降低。因此抖动信号的幅度选取应合适。相位抖动范围太大会损失SFDR,太小时不能达到抑制杂散频率的效果[3]。相位抖动在实现时采用线性反馈移位寄存器(LFSR)生成伪随机信号序列,相位抖动模块输出的随机信号序列是[0,]范围内的随机值,其中,k为截断相位位宽。
迭代残余角度误差补偿
假设输入CORDIC模块的相角为,经过N次迭代后累加相角为,残余角度为:
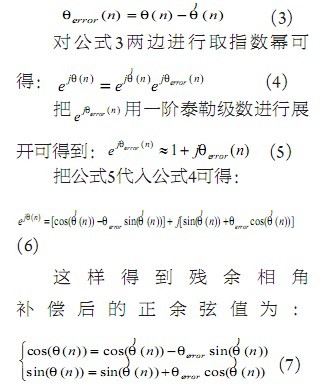
这样就可以用公式7来补偿迭代残余角度误差引起的杂散,在方法实现时迭代残余角度误差补偿作为第一级补偿。
基于Taylor级数近似补偿的改进数控振荡器实现
在实现的时候,本文把CORDIC迭代后残余相角补偿作为第一级补偿模块,泰勒级数作为第二级补偿,同时为了降低CORDIC算法旋转产生的角度周期性误差,在设计数控振荡器时,在相位累加器部分引入了随机信号产生模块用来改善角度周期性误差所引起的杂散。基于改进CORDIC算法的数控振荡器的结构如图1所示,主要有相位累加器部分、随机信号产生模块、残余相角补偿模块、二阶泰勒级数补偿模块、正余弦值校正模块等部分组成,在整个结构的实现时采用了流水线结构,这样可以提高数控振荡器的计算速度。图1中灰色的部分是本文提出的对传统CORDIC算法实现的补偿部分。





评论