
利用无传感器矢量控制技术实现超高效率电机控制
由于 d 轴和 q 轴之间存在交叉耦合效应,如图 2 所示,因此两个轴的电流无法由电压 Vd和 Vq独立控制。为实现高性能速度控制,需要运用具有去耦前馈补偿功能的 d 轴和 q 轴电流调整器。更多信息请参考图 3:
本文引用地址://m.amcfsurvey.com/article/111226.htm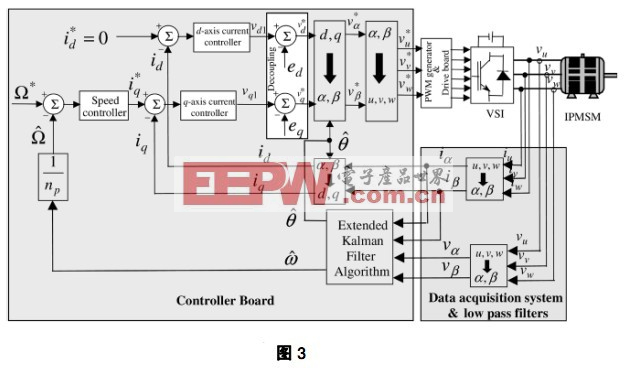
为使 IPMSM的扭矩电流比最大,d 轴基准电流![]() 设置为 0。q 轴基准电流
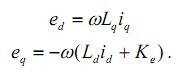
设置为 0。q 轴基准电流![]() 从速度调整器的速度误差获得,如图 3 所示。电流调整器的输出提供旋转坐标系的基准电压。在图 3 所示的框图中,用于去耦控制的前馈项 ed和 eq由下式给出:
从速度调整器的速度误差获得,如图 3 所示。电流调整器的输出提供旋转坐标系的基准电压。在图 3 所示的框图中,用于去耦控制的前馈项 ed和 eq由下式给出:
正如 Boussak 所述,两个补偿机制(电流控制和电压命令)对于确保稳定和最优控制十分重要,有助于增强矢量控制和弱磁通量控制。
EKF 以其简单、最佳、易控制和稳定可靠,成为应用最广泛的非线性系统跟踪和估计方法之一。为实现对凸极 IPMSM的无传感器控制,可以利用 EKF 估计速度和转子位置。电机的线路电压和负载扭矩均为系统矢量输入变量。速度和转子位置是需要估计的两个幅度,二者与电机电流一起构成状态矢量。电机电流将是构成输出矢量的唯一可观测幅度。
要对无传感器 IPMSM驱动实施 EKF 技术,双轴坐标系的选择至关重要。最佳选择是采用随转子转动的 d 和 q 旋转坐标系。但估计器的输入矢量(电流和电压)取决于转子位置,所以这种方案与IPMSM无传感器速度控制不兼容。在实现过程中可观察到,转子初始位置的估计误差可能会将误差引入实际系统的 EFK 处理过程中,从而引起严重后果。
对于这种情况,Boussak 建议在转子坐标系中调准 IPMSM控制。速度和位置仅利用定子电压和电流测量结果来估计。基于 EKF 的观测器使用基于定子坐标的固定参考系 α-β 的电机模型,因此与转子位置无关。导出 IPMSM在固定坐标系中的非线性动态模型,以完成估计器公式:
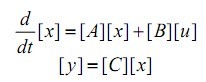
两个定子电流、电机速度和位置用作系统状态变量(更高级计算方案请参考 Boussak 的论文)。
诸如 Bon-Ho Bae 和 Boussak 所开发的实现方法,利用无传感器控制器的可行性将更高级模型引入实时电机控制方案。过去 2 到 4 年来,微控制器和DSP制造商一直积极通过新型嵌入式处理器提供足够的性能和必要的功能,这是确保设计人员将无传感器矢量控制运用于实际的关键因素。
电机效率始于处理器
如今,像ADI公司的 Blackfin®和 SHARC®等增强型处理器正在将性价比提升到新的水平,使得更复杂电机控制算法的实施开始受到大规模应用解决方案的青睐。利用这些处理器,更好的控制器和控制方案可以将电机驱动效率提高到接近 100%。在工业领域,对运行于实时模型估计器的多个观测器模型的改善,无疑将有助于增强:(1) 驱动性能;(2) 系统效率和拓扑结构;以及 (3) 设计的实现方法。就第(3)方面而言,Matlab/Simulink 等图形系统便能够简化设计流程,促进新算法的开发。借助这些工具,并与执行处理器相结合,显然能够实现更复杂的设计。围绕内核速度、模数转换分辨率和存储器集成进行处理器级改善,将使设计人员能够实现更高质量和性能目标,同时加速产品上市。
ADI公司最近推出的 Blackfin BF50x 系列数字信号处理器,不仅大幅提升了处理性能,而且降低了价格,使得以前采用性能受限的处理器和微控制器的电机控制应用,也能享用DSP水平的性能。借助这种处理性能,电机系统设计人员可以利用更先进的算法实现更强的系统功能和更高精度,精确判定转轴位置和速度,这样系统就无需位置和速度传感器。
Blackfin BF50x 系列就是上述片内集成度提高的典范,它集成的器件包括用于精密数据转换和精确建模的高分辨率 ADC,以及用于加速算法处理的闪存,二者均有利于减少片外器件并降低系统整体成本。这些处理器提供性能与片内集成度的最佳融合,使得设计人员能够实现许多系统级设计目标,例如:实时处理更多数据,延时更短,将处理任务集中于单个处理器进行,以及更灵活地优化系统接口和控制能力。
如今,新技术正在推动电机系统能力实现突破性转变,设计拓扑结构与处理器特性平衡则可实现更高的整体系统性能和效率。高性能DSP支持运用现代控制理论完成高级系统建模,从而确保所有实时电机系统都能实现最佳电源和控制效率。无传感器矢量控制的广泛应用势在必行,必将加速全球提高工业设备能效和性能的进程。












评论