
MC9S12DG128的路径识别的智能车系统设计
1.4 车速检测模块
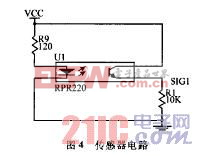
车速检测模块采用韩国Autonics公司的E30S-360-3-2型旋转编码器作为车速检测器件。该旋转编码器硬件电路简单、信号采集速度快,360线的精度足以满足PI控制算法调节的需要。旋转编码器与直流驱动电机通过齿数为1:1的两齿轮连接在一起,所以智能车车轮转动一圈即可以用360个脉冲表示。因此一定时间内单片机累加器获得的脉冲数值可以用来表示车速,并可直接作为控制器参数。图4为车速检测模块硬件电路图。
1.5 舵机控制模块
本系统使用SANWA SRM102型舵机完成智能车转向。舵机属于位置伺服电机,控制信号是MC9S12DG128单片机产生的PWM信号。舵机自身硬件特性决定:在给定电压一定时,空载和带载时的角速度ω分别保持恒值,而线速度υ=ω?R,正比于转臂的长度R。当舵机所需转动幅度一定时,长转臂要比短转臂转动的角度小,即响应更快。如图5所示,对于转臂1和2,当R1R2且转动相同的位移时,转角θ1>θ2。因此对于相同的角速度ω,可得转臂响应时间t1>t2。显然利用舵机的转距余量可以提高系统整体的响应速度[4]。
智能车在行驶过程中,舵机的响应时间决定着系统的稳定性及快速性。为了减小舵机的时滞现象,充分利用舵机的转矩余量,本系统采用了以下三种方法:
(1) 提高舵机工作电压,使其工作在额定电压之上,从而减小舵机的响应时间;
(2) 将舵机转臂加长至3.5cm,充分利用转矩余量;
(3) 将两个8位PWM寄存器合并为一个16位PWM寄存器,将舵机的PWM控制周期放大至2000,从而细化PWM控制量,使转臂变化更加灵活、均匀。















评论