
基于Zigbee无线传感器网络的智能灯光跟随系统
3 系统的软件设计
3.1无线传感器网络的设计
系统中Zigbee节点的软件设计移植了Z-stack协议栈,该协议栈提供了完整的路由协议,并对应用层是完全透明的,只需将数据下发至协议栈,协议栈便会自动寻找路径,因此在程序开发上,主要是在Z-stack协议栈的基础上,完成协调器节点和传感器节点的程序设计。
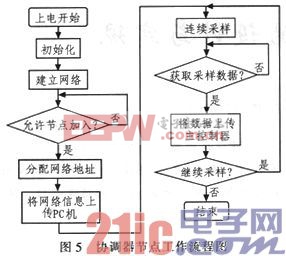
1)协调器节点的软件设计
协调器节点是整个网络的核心,负责网络的建立和管理,工作流程图如图5所示。系统上电后,首先初始化硬件和协议栈,初始化完成后,协议栈扫描出一个合适的信道建立一个网络。当有设备请求加入时,协调器负责分配它一个16位的短地址,并允许加入网络,组网完成后,协调器节点开始接受从传感器节点传送过来的数据并通过串口传至嵌入式控制器。本文引用地址://m.amcfsurvey.com/article/159594.htm
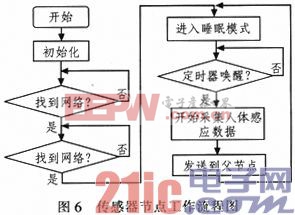
2)传感器节点的设计
传感器节点工作流程图如图6,其主要通过无线传输的方式,将采集到的人员信息送至协调器节点。完成CC2430的初始化后,开始扫瞄信道,寻找到合适的网络,发进加入网络信息,得到确认后,开始进入休眠状态,等待定时器唤醒,收到唤醒指令后,开始通过传感器采集信息,并发至其父节点。
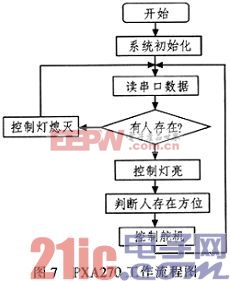
3.2 嵌入式控制器的软件设计
PXA270通过串口接收Zigbee节点采集到的信息,根据Zigbee的16位物理地址和相应采集到人是否存在的信息来确定人员的方位,工作流程如图7所示,首先,检测是否有节点返回有人存在的信息,如果无人存在,则把I/O口的输出设置为低电平,使灯熄灭,否则,I/O设置为高电平,灯亮起,然后根据返回的Zigbee的物理地址,判断是哪个节点返回的信息,从而确定人员存在的大致方位,进而控制舵机转动,使灯光照向这个方位。
4 系统测试
实验时,在实验室搭建了1个小的模型,其中的无线传感器网络包含1个协调器节点和3个传感器节点(Zigbee节点实物如图8),传感器节点均匀地分布在走廊的两侧,PXA270和照明装置(实物如图9)放在了较高的柜子上。
Zigbee节点上电后,过了大约5 s,开发板上的led显示网络建立完成,当人走过时,灯自动的开启,舵机转动,照向人存在的方位,当人走动的时侯,舵机随之转动。当人离开检测区域时,照明装置自动熄灭,实验结果表明,该系统可以正常工作。
5 结束语
文中采用无线传感器技术、Zigbee技术、传感器技术、嵌入式技术和计算机技术构建智能灯光跟随系统,实现对人体的检测并使灯光跟随人体移动,从而达到节能环保的效果。本系统具有成本低、低功耗、检测准确、实用性强等特点,非常适合在走廊、道路等场所使用,具有很好的经济效益和社会价值。目前,我们尚处在实验阶段,正在进行产品化过渡。








评论