
多路UART总线与CAN总线通讯系统设计
2 系统设计
系统总体电路图如图1所示,主要有3个部分组成,UART模块、CAN模块和微控制处理器。UART模块采用TI公司的TL16C554,它是一个4路通用异步收发器,每路均能从外围设备或MODEM接收串行数据,实现串一并转换;同时,它也可以从CPU端接收数据,实现并一串转换。本文引用地址://m.amcfsurvey.com/article/159896.htm
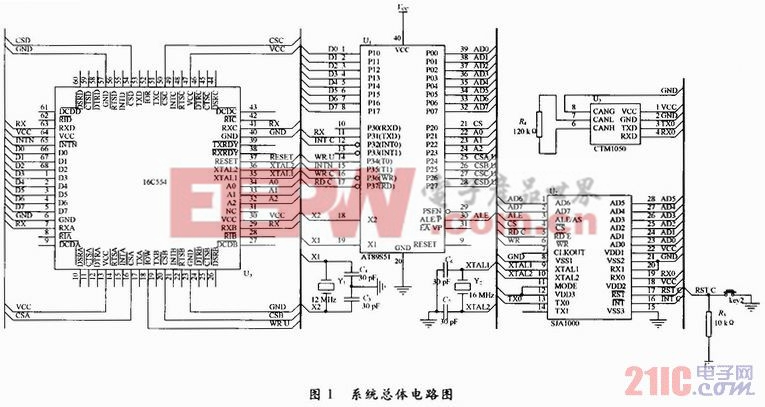
CAN模块采用PHILIPS公司的SJA1000,它是一种独立的CAN控制器兼容CAN2.0A和CAN2.0B两种技术规范。微控制器采用8位单片机AT89S 51,主要对UART模块和CAN模块进行初始化控制,并产生串行数据输送给UART模块。
2.1 UART模块通讯设计
UART模块通讯设计主要利用单片机控制4路异步收发器TL16C554。单片机首先通过数据线D7~D0、地址线A2~A0初始化TL16C554,配置好串行传输波特率、字符格式以及中断控制信号等寄存器,并通过4路通道的片选信号CSA,CSB,CSC和CSD选通其中的一路。利用单片机自身的串行接口发送串行数据,送入TL16C554,UART模块接收到串行数据后,将其转换成并行数据存入FIFO中,并通知单片机数据转换完成,单片机从UART模块的FIFO中读取数据,并准备好发送给CAN模块。通讯流程图如图2所示。
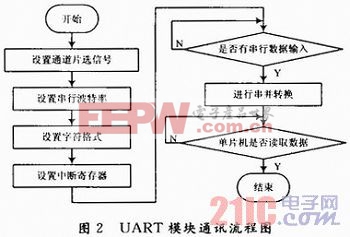
如果要实现多路UART总线与CAN总线通讯,利用通道各自的片选信号进行控制,在一路通道转换结束后再进行选通另一路通道,相互之间必须进行分时操作,协调处理。














评论