
基于增量式光电编码器位移传感器研究
位移传感器正常工作时,外部线形位移通过光栅信号编码器转化为数字脉冲信号,传感器调整电路将接收此脉冲信号,经过阻抗匹配和信号驱动放大,然后送往信息处理电路,通过计算脉冲个数将外部线形位移换算成对应的数字量保存在动态RAM中,最后信息处理电路将驱动液晶显示屏将RAM中的数据显示在屏中。
3.1 光栅信号编码器
光电式拉线位移传感器的结构主要由调制盘、红外线发光二极管(SFH485,发散角为40°)和红外接收二极管组成。仪器通过一钢丝拉线与待测位移物体相连,拉线采用线膨胀系数小、化学性能稳定的铟钢丝。当待测物体相对于光栅信号编码器的固定轴发生位置变化时,则位移量由拉线传动到光栅信号编码器上,调制盘的边缘均匀分布着透光孔,红外线发光二极管和接收管分别安置在调制盘的上下两边。用恒压源给红外线发光二极管供电,当调制盘转动时,发光二极管发出的光线将周期性的被遮挡,接收二极管上将出现周期的脉冲电压信号,每一个电压峰值即表示一个透光孔扫过接收二极管。将信号滤波、放大与整形后输出。
设机械放大倍数为n,物体运动的位移量为△x,两相邻透光孔中心相距的弧长为L,则信号输出端的脉冲个数N可由下式表出:N=△x·n /L,记下脉冲的个数即可计算出位移变化量了。
为了提高光栅信号传感器的抗干扰能力,光栅传感器采用24 V直流电源供电,经过后续电路将信号处理为幅值为5 V的脉冲信号。供信号处理电路采集处理。
3.2 调理电路
调理电路将光栅信号编码器装置输出的信号进行滤波、放大与整形输出。调理电路将对传感器输出的信号进行以下处理:
1)阻抗匹配:提高信号的输出阻抗,有效地减少信号在传输过程中的反射;
2)提高信号的驱动负载能力:由于传感器输出信号的驱动能力很弱,连接负载时信号容易畸变。
3.3 信息处理电路
信息处理电路首先将光栅信号编码器输出的数据进行采集,然后将数据进行运算处理,最后驱动液晶显示屏,将需要的数据显示。
为了提高测长装置的抗干扰能力,尤其是光栅编码器输出脉冲的抖动,信息处理电路的接口与光栅编码器输出之间采用隔离耦合的方式通信。通过隔离耦合使信息处理电路接收信号不受光栅编码器输出抖动的影响。
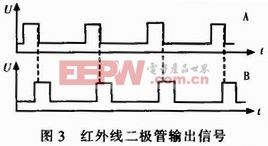
信息采集电路接收到从红外接收管输出的电压信号经滤波后由运放进行放大,使其峰值达到TTL电平,然后由施密特触发器进行整形,将信号变成一定脉宽的方波,如图3所示,然后单片机记下脉冲数。本文引用地址://m.amcfsurvey.com/article/160457.htm
同时信息采集电路接收到外部计算机的指令后,可以控制其运行状态,具有远程控制的特点。
3.4 液晶显示模块
本设计中采用JHD161A液晶显示屏。JHD161A具有微功耗、体积小、显示内容丰富、超薄轻巧的优点,在袖珍式仪表和低功耗应用系统中得到广泛的应用。
JHD161A是一种用5x7点阵图形来显示字符的液晶显示器,是武汉博控科技有限公司生产的1行16个字符的LCD显示模块,控制芯片为三星电子公司生产KS0066驱动芯片。它采用16脚单排接口。
液晶显示模块与信息处理电路通过扁平电缆连接,信息处理电路根据显示的需要,首先模拟液晶显示屏的读写时序,将数据写入液晶显示屏的控制芯片RAM中,然后控制显示屏的显示与清屏,从而达到显示屏数据的刷新和与外部线性位移的同步显示。
4 传感器的辨向识别设计
光栅信号编码器是通过驱动装置驱动栅轮转动。栅轮轮沿为格栅状。紧靠栅轮格栅两侧为发光管和接收管,一侧是一红外发光管,另一侧是红外接收组件。红外接收组件为一三端器件,其中包含甲乙两个红外接收管。栅轮转动时,栅轮的轮齿周期性遮挡红外发光管发出的红外线照射到接收组件中的甲管和乙管,从而甲和乙输出端输出同周期的数字脉冲信号。栅轮轮齿夹在红外发射与接收中间的部分的移动方向为上下方向,由于红外接收组件中甲乙两管与红外发射管的夹角不为零,于是甲乙管输出的数字信号有一个相位差。
信息处理板上单片机通过此脉冲相位差判知栅轮的转动方向,同时计算出栅轮的转动速度和牵引绳的移动位移。
为了提高传感器的可靠性,本设计中借鉴了差分式增量编码器的设计特点,即设计中引用了A相非信号,极大地提高了传感器辞向的可靠性。同时通过信息处理板上单片机对采集信号的处理,有效地提高了传感器的稳定性。由于单片机相应中断信号具有一定的优先级,将两路外部中断通过同一路信号源通过一定的处理控制,从而确保中断响应的正确可靠,中断程序中对另一路信号的特征进行判断,从而实现传感器的辨向识别。
5 无误差测量的原理及其实现
5.1 无误差测量的原理
检测A相一个周期中的同一个边沿位置,如果在此边沿位置检测到一个上升沿,则对应编码器的一个旋转方向;如果在此边沿泣置检测到一个下降沿,则对应编码器的另一个旋转方向。B相为高电平时,若检测到A相为上升沿,则可判断出编码器输出波形的运动方向为从左向右,即编码器为逆时针方向旋转;若检测到A相为下降沿,则可判断出编码器输出波形的运动方向为从右向左,即编码器为顺时针方向旋转;B相为低电平的情况可类推。
5.2 无误差测量的软件实现
无误差测量的软件实现原理:当A相出现一个上升沿(即A非相出现一个下降沿),若检测到B为高电平,则用软件令计数器加1;当A相出现一个下降沿,若检测到B为高电平,则用软件令计数器减1。这样,两个计数器之差,则对应了编码器实际的角位移,而其正负对应了旋转方向。设置单片机外部中断的触发方式为下降沿触发,当INT0产生中断,判断B为高电平,则令计数器减1;当INT1产生中断,判断B为高电平,则令计数器加1。
这种方法的优点是:其硬件简洁,程序简单,测量精确;其缺点是:其旋转速度要受到单片机响应速度的限制。其对计数器的加减都是通过运行指令实现的,这也要花费一定的时间,使得其响应频率降低,其响应条件为编码器的输出脉冲周期要大于单片机的中断响应时间与中断服务时间之和,而输出脉冲周期又与编码器的旋转速度有关,旋转越快,输出脉冲周期就越小。












评论