
基于三相四线APF的模糊直接反馈控制
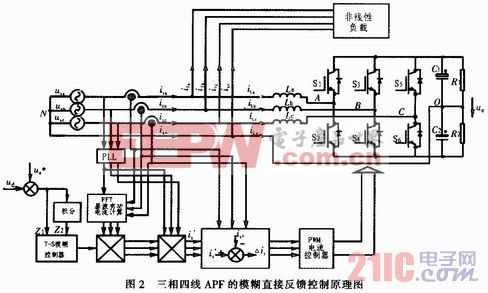
经由以上的分析,将模糊控制器构造闭环反馈控制,可以对三相四线APF的进行有效地控制,校正了由负载非线性电流,实现了对非线性电流的补偿,实现的原理如图2所示。本文引用地址://m.amcfsurvey.com/article/160466.htm
3模糊反馈控制器设计
3.1三相四线APF的T-S模糊直接反馈控制稳定性
对于以上所建立三相四线APF的T-S模糊控制模型(17),利用平行分布补偿算法设计模糊状态反馈控制律(18),得到闭环反馈控制系统(19),需要保证系统是稳定的。对开环模糊模型(17)在状态反馈控制律(18)条件下的闭环模糊系统(19),存在一个公共的对称正定矩阵H,和矩阵Gij=Mi-NiKj,选取Lyapunov函数V(x(t))=xδ(t)THxδ(t),当x(t)≠0时,有V(x(t))0。根据Lyapunov稳定定理,闭环模糊系统(19)在平衡点是全局渐近稳定的。
3.2 三相四线APF的T-S模糊直接反馈控制器设计
为了求解模糊反馈控制器的状态反馈增益矩阵Ki及正定矩阵H,通过简单的变量代换,转换为求解等价的矩阵X=H-1及矩阵Yi=KiX的线性矩阵不等式形式,可通过MATLAB软件中的LMI工具箱求解。本系统中,三相四线APF的主电路参数为La=Lb=Lc=L=4 mH,C1=C2=4700μF,R1=R2= 5 kΩ,根据主电路模型,参考文献,选择x4(0)=800 V,得平衡点处da(0)=0.111 25,db(0)=dc(0)=0.694 375,x1(0)=-0.137 2 A,x2(0)=x3(0)=0.068 6 A。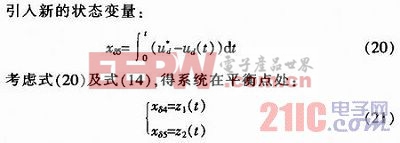
故系统在平衡点处的状态空间模型如式(22)所示。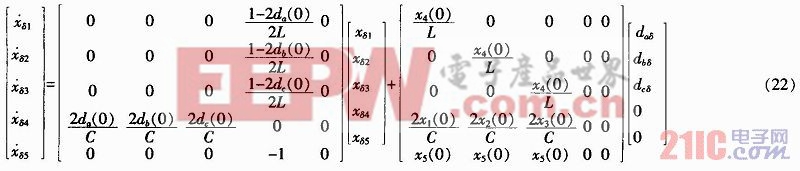
由式(15)和式(16)的模糊前件变量函数,可得到系数矩阵行列式Mi、Ni的数值解。根据系统的特性,选择α1=10,α2=80,利用LMI工具箱可得到公共正定矩阵H以及4个反馈增益矩阵K1,K2,K3和K4的数值解。
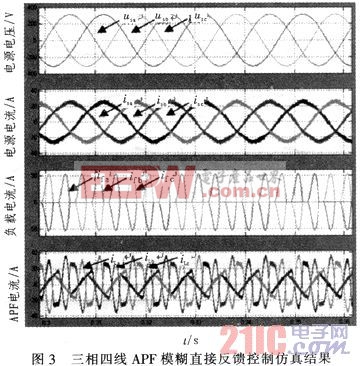
4 仿真及实验结果
由以上分析,在MATLAB中建立如图2所示的三相四线APF模糊直接反馈控制的仿真电路。其中三相非线性负载为三相全桥整流电路,滤波电感为0.5 mH,滤波电容为1 000μF,负载电阻为25 Ω,仿真结果如图3所示。



















评论