
智能手机等移动设备中的MEMS传感器
室内方位检测
尽管智能手机内置GPS接收器,在户外的定位功能非常不错,可在数字地图上显示航向,但是,某些GPS接收器在室内或高楼林立的城区无法接收卫星定位信号。即便在户外,当汽车或行人静止时,GPS也无法提供精确的方位或航向信息。GPS无法区分微小的高度变化。此外,GPS仅凭一个天线无法为手机或汽车用户提供俯仰/滚转/航向等姿态信息。
DGPS的定位精度为几cm,但是需要另一个GPS接收器做基站,使用某一种距离粗捕获码向移动GPS接收器发射参考位置信息。辅助全球定位系统(A-GPS)在某种程度上有助于GPS获得室内定位信息,但无法在可以接受的间隔内提供精确的定位信息。当手机用户静止时,至少需要三个GPS天线才能检测到用户的姿态信息。不过,目前还无法在一部智能手机上安装多个GPS天线。
因此,仅有GPS的智能手机无法为用户提供精确的方位和姿态信息。自导式MEMS传感器是协助GPS实现一体化导航系统、提供室内外LBS定位服务的选择。
当天线没有被遮挡时,GPS接收器的绝对定位精度是3m到20m,这个参数在一段时期后不会发生漂移。基于MEMS传感器的捷联式惯性导航系统(Strap-down Inertial Navigation System,SINS) 可在很短时间内提供精确的定位信息。但是,根据运动传感器的性能,这种导航系统在使用一段时间后很快就会发生精度漂移现象。行人航位推算系统(Pedestrian Dead Reckoning,PDR)是一个根据步长和方位计算从室内已知初始位置开始的行走距离的相对导航系统,虽然定位精度不会随时间推移而发生漂移,但是需要在受磁力干扰的环境内保持航向精度。此外,GPS需要对步长进行校准,才能达到可以接受的定位精度。
按照捷联式惯性导航系统理论,根据内在的偏差漂移和比例因数,惯性传感器(3轴加速度计和3轴陀螺仪)可分为三大类:导航级、战术级和商用级。通过下面两个方程式 ⑴ ,可以计算出独立的加速度计和陀螺仪的水平位置误差。
加速度计的位置误差: PE_ACC=1/2 ACC_biasT2 (1)
其中ACC_bias是加速度计长期偏差稳定性,单位是mg;g=9.81m/s2;T是双重积分周期,单位是s;PE_ACC是ACC_bias造成的位置误差,单位是m。
陀螺仪的位置误差:PE_GYRO=1/6 gGYRO_biasT3 (2)
其中g是地球重力,9.81m/s2;GYRO_bias
陀螺仪长期偏差稳定性,单位是rad/s;T是双重积分周期,单位是s,PE_ACC是GYRO_bias造成的位置误差,单位是m。
以上两个方程式可用于计算典型惯性传感器的性能和长期偏差稳定性引起的水平位置误差。当惯性传感器与GPS集成在一起时,这些误差不会随时间推移而扩大,其它引起位置误差的因素,如失匹、非线性和温度影响,也应在计算中给予考虑。
最近在MEMS工艺上取得的进步使MEMS加速度计和陀螺仪能够连续地提供更高的定位性能,使商用级产品更接近战术级产品的性能。在较短的时间,如1分钟内,独立的加速度计和陀螺仪可取得相对较高的测量精度。当GPS信号受阻时,这对于GPS/SINS一体化导航系统很有用。
对于消费电子产品,室内行人航位推算系统5%的行进距离误差通常是可以接受的。例如,当一个人走过100m的距离时,定位误差应该在5m范围内。这要求航向误差在±2°到±5°之间[2]。例如,如果航位误差是2°,当一个人走过100m的距离时,定位误差应该在3.5m范围内[即2×100m×sin(2°/2)]。
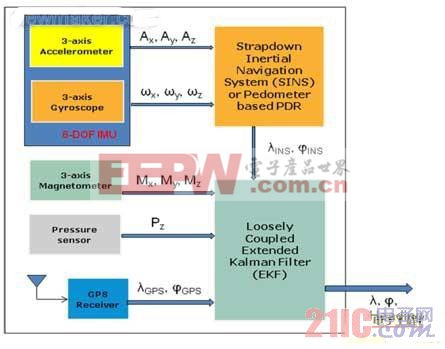
此外,由于MEMS压力传感器能够测量相对于海平面的绝对气压。因此,它可以确定手机用户在海平面以下600m到海平面以上 9000m之间的高度,辅助GPS的高度测量[2]。利用MEMS传感器与GPS接收器的行人航位推算系统结构图如图2所示。








评论