
基于ARM的嵌入式航空拖靶高度控制器设计
2.2 舵机驱动控制板
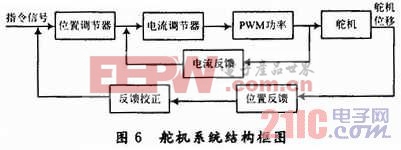
舵机驱动控制板和电动舵机以及位置反馈电位计构成了拖靶的舵机系统。舵机系统采用双闭环即电流环和位置环的控制结构。电流环作为内环,用于抑制转矩和电流的波动,减小功放死区,提高线性度。位置环是舵机系统的主回路,目的是保证较好的位置控制精度。由于拖靶自身的稳定性较好,故舵回路不采用速度环,而引入适当的微分器,以改善系统阻尼,提高系统刚度,减小各种非线性因素的影响。舵机系统结构框图如图6所示。本文引用地址://m.amcfsurvey.com/article/162239.htm
舵机驱动控制板包含采用模拟电路实现的位置调节器、电流调节器、PWM功放和反馈校正网络。考虑到舵机系统的响应速度,位置调节器和电流调节器均采用简单的比例式调节规律,由模拟集成运放AD822AN实现。位置反馈是舵机系统的主反馈,升降翼面的定位精度主要取决于位置传感器的精度。标准电阻是小功率系统中常用的一种电流传感器,因其简单可靠、阻值稳定、精度高、频响好、输出标准电压直接比例于所通过的电流,因而在PWM系统中得到了广泛应用,故采用标准取样电阻作电流传感器。舵机驱动控制板围绕直流电机驱动器专用集成电路L292设计了其外围电路,L292是一种PWM直流电机驱动器专用集成电路。与线性功放相比,PWM功放具有功耗低、效率高、工作稳定可靠等优点,尤其是它的动力润滑作用,对减小舵机死区,改善静态精度和低速爬行非常有利。它的驱动能力强,可达2A/36V,集成度高,开关频率可外部设定,片内设有过载保护和欠压保护等功能。
2.3 传感器与舵机执行机构配置
(1)无线电高度表。采用调频/连续波(FM/CW)体制,工作频率4 200~4 400 MHz,测高范围0~300 m。高度输出形式为232数字信号或模拟电压输出两种格式,周期为20 ms。两种输出格式可通过发送指令进行选择,这里使用的是精简格式,一帧数据为4 B,前2 B和后2 B表示同一高度值,低位在前,高位在后。
(2)加速度计。加速度计安装在拖靶的重心位置,集成在高度控制计算机机盒内,用于测量拖靶的垂直方向加速度,选用ADXL105AQC加速度计芯片,精度±1g~±5g,单通道模拟输出,分辨率2 mg。工作电压为单电源2.7~5.25 V,具有自检功能,芯片自带温度传感器模拟输出,还带有运算放大器,10 kHz的工作带宽。
(3)舵机及执行机构。包括力矩舵机、螺旋传动机构、摇臂和直滑式位移传感器。舵机采用齿轮减速永磁直流力矩电机,额定转矩0.3 nm,额定电流0.3 A,额定电压27 V,额定转速(80±8)r/min,空载转速90 r/min。舵机以螺旋传动方式来操纵舵面,同时靠摇臂带动直滑式导电塑料位移传感器反馈升降翼面偏转角度。这里的位移传感器选用直滑式精密导电塑料电位器做位置传感器,其行程为3 cm,阻值为2 kΩ,独立线性度为0.1%。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)







评论