
基于DSP的无位置传感器永磁同步电机磁场定向控制系统
式(8)为基本电流观测器,式(9)为BANG-BANG控制器。二者组成滑模电流观测器,目的是通过适当选择Z和估计反电势,使估计电流和实测电流误差为零。二者离散形式为
(2)估计反电势 
(3)转子磁链位置θ估算
由反电势来估计转子磁链位置角,式(14)为反电势综合矢量表达式,可根据反电势在α、β轴上的分量来求解转子磁链位置角,即式
(4)转子磁链位置校正
采用低通滤波器来获得反电势,引入了相延迟。该延迟与低通滤波器的相位响应直接相关,其截止频率越低,对应固定频率的相延迟越大。
基于低通滤波器的相位响应,做一个相延迟表,可以通过查表求得运行时对应指令速度(频率)的相移角。该相移角加上得到。
4 系统软件流程
主程序流程如图6所示,只完成系统硬件和软件的初始化任务,然后处于等待状态。完整的FOC控制算法在PWM中断服务程序中实现。在一个中断周期内,流程依照系统控制框图图2,从一路AD采样电流,计算转子位置角,计算转速,完成所有反馈通道计算后,再调用正向通道中计算模块函数,最后输出三相逆变桥的空间矢量PWM波信号。

5 涉及的硬件
直流电压供电的三相逆变桥输出接星型接法的三相电机定子绕组。DSP提供的六个PWM输出经光耦隔离以驱动三相逆变桥开关器件。
置于直流回路的电阻传感器,提供电机线电流电压信号,该信号经放大后送入DSP的ADC通道。在实现控制算法时,由TMS320C24x控制器的EVM事件触发中断进行AD采样。
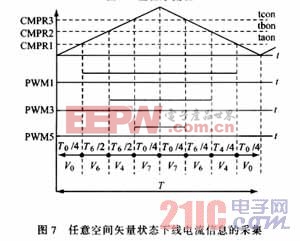
在每个对称空间矢量PWM周期的前半周期开关状态(Sa,Sb,Sc)从(0,0,0)变到(1,1,1),在这一过程的两个中间状态采样线电流信号,在图7中为(1,0,0)和(1,1,0),结合图3定义的三相桥臂开关状态,(1,0,0)时线电流对应a相电流值ia,(1,1,0)时线电流对应c 相电流值-ic,这样在一个周期内两次采样分别得到两相电流值,另一路由ia+ib+ic=0得到。
6 结论
本文介绍了一种对PMSM采用DSP控制器的方案,利用TMS320C24x控制器的DSP结构及优化的微控制器外围电路,采用智能控制策略,以获得转子位置和速度信息,从而取消转子位置传感器,对设计PMSM控制系统,降低系统成本,提高系统可靠性提供了一种新思路。

电流传感器相关文章:电流传感器原理











评论