
ESP系统传感器特性分析及接口技术
方向盘转角传感器的输出为正交编码脉冲。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移,如图5所示。通过检测2路信号的相位关系可以判断为顺时针方向和逆时针方向,并据此对信号进行加/减计数,从而得到当前的计数累计值,也即方向盘的绝对转角,而转角的变化率即角速度,则可通过信号频率测出。另外,方向盘转角传感器有一个零位输出信号,当方向盘在中间位置时,该信号输出0V,否则输出5V,通过该信号,可对绝对转角进行在线校准。
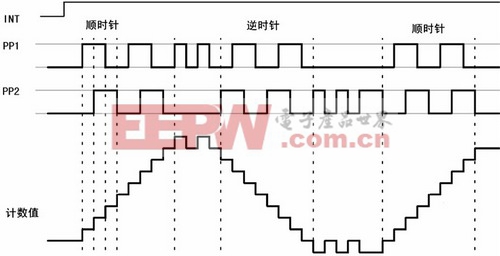
图5 方向盘转角传感器脉冲序列波形
C164CI与方向盘转角传感器的接口电路如图6所示。片内内置增量编码的正交解码器,该解码器使用定时器3的两个引脚(T3IN、T3EUD)作为正交脉冲的输入,在正确设置相关寄存器后,定时器3的数据寄存器的值与方向盘转角成正比,故可方便的计算转角,本文所使用的方向盘转角传感器每一圈对应44个脉冲,设定时器3的数据寄存器为T3,则绝对转角为.
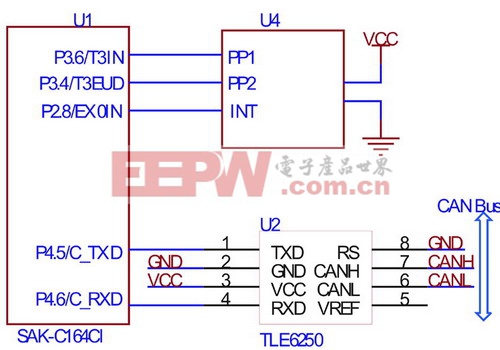
图6 方向盘转角传感器接口电路
对(1)式进行差分运算,即可得到转角变化速率。微控制器把计算得到的参数通过CAN发送给ECU。
轮速传感器接口
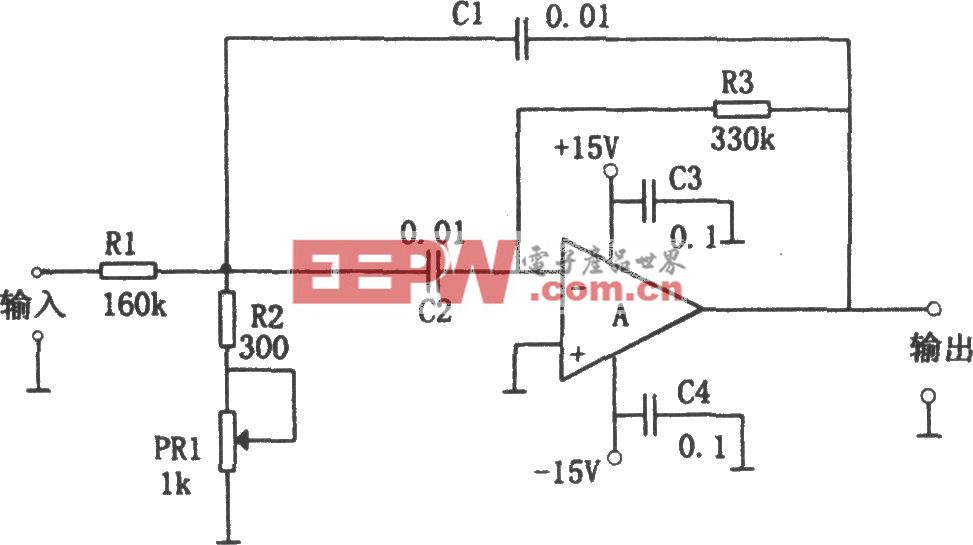
根据前面部分介绍的轮速传感器信号特点,设计接口电路如图7所示。

图7 轮速传感器接口电路
电路采用两级滤波和整形,以保证轮速信号在极低转速下不会丢失,同时避免因悬架振动引起的信号干扰。图中由电阻R2引入第一级迟滞比较,而使用74HC14引入第二级迟滞比较。










评论