
异步电机无速度传感器矢量控制系统研究
l异步电机转子磁链及转子转速的估算
1.1 转子磁链的估算
在转子磁场定向异步电机元速度传感器矢量控制系统中,转子磁链难以直接测量。实际采用的是其观测值,只有当观测值与实际值相等时,才能达到矢量控制的有效性。因此,准确的获得转子磁链值是实现矢量控制的关键。
按转子磁场定向异步电机数学模型可推导出磁链的计算公式如下(推导过程略),其中磁链的估算包括其幅值和角度。
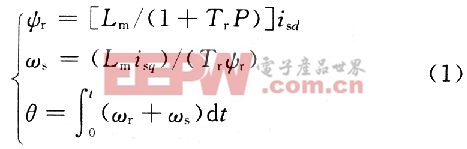
式中:ψr为转子磁链;ωs为转差角速度;ωr为转子转速;isd,isq为定子d,q轴电流;Tr为转子时间常数,Tr=Lr/Rr,Lm为定转子互感;Lr为转子电感;Rr为转子电阻;θ为磁链角度,P=du/dt。
1.2 转子转速的估算
采用MRAS方法对转子转速进行估计。基本思想是:在异步电机两相静止坐标系下,以不含有转速变量的转子磁链观测电压模型为参考模型,含有转速变量的转子磁链观测电流模型为可调模型,利用波波夫超稳定性理论设计自适应辨识规律,从而实现对转子转速进行估计。异步电机两相静止α,β坐标系下转子磁链观测模型如下两式所示:
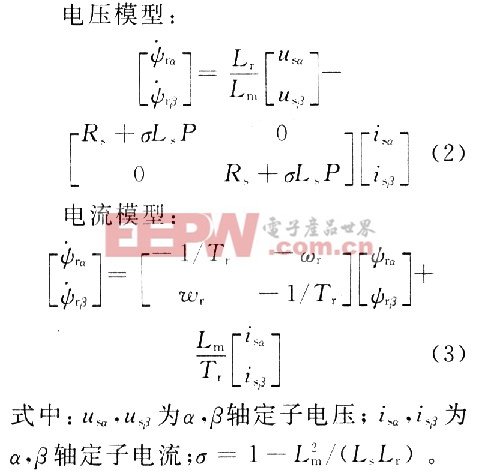
式(2)不含有转速变量,作为参考模型,式(3)含有转速变量作为可调模型。在设计模型参考自适应律时,将电流模型转速变量看成常数作为参考模型,式(3)作为并联估计模型:从而得到误差方程:











评论