
基于ATmega48单片机的简易灭火机器人设计
4机器人的执行器
本设计的主要执行装置采用的是电机,根据不同的控制要求电机可以分很多种,有直流电机、步进电动机、舵机、伺服电动机等等。各种不同的电机有各自不同的控制方式,和工作特
性。本设计的执行器主要包括机器人的行进系统和灭火装置,底盘驱动需要控制简单方便,价格便宜,对控制精度没有过高要求,所以可选择小型直流电动机,额定电压DC9V,额定转速200r/min。该灭火机器人的灭火机构设计采用一个离心水泵,所以同样选择一个直流电动机即可。
5 机器人的控制器
控制器是机器人的“大脑”,是机器人的核心部分,其主要功能有:①机器人行动的规划,使机器人有序的工作;②了解工作环境,采集和存储工作现场的信息,并进行火灾情况的判断和分析;③与外界进行信息的交互。
针对本设计选择控制器的问题,综合比较了51单片机与AVR单片机,由于AVR单片机具有编程灵活,使用C语言编程更容易,并自带PWM功能,支持ISP功能,而且中断源比较多。相比较而言51单片机抗干扰性能差,需要外围电路复杂,没有自带的PWM和AD功能,而且中断源少。综合这些特点及本设计的控制要求和设计思路,最终选择AVR单片机ATmega48作为控制器。
5.1ATmega48单片机的引脚排列及各管脚功能介绍
5.1.1 信号引脚介绍:
如图3所示。
★输入/输出口线
I/O口线:ATmega48单片机有3组I/O接口,即PB口、PC口和PD口。其中,PB口(PB0~PB7)和PD口(PD0~PD7)为8位I/O口,PC口(PC0~PC6)为7位I/O口。
★AGND 模拟/数字转换器的电源地
★AVCC 模拟/数字转换器的电源
★AREF 模拟/数字转换器的参考电源输入端
★VCC 电源
★GND 电源地
5.1.2 编程软件介绍
ICCAVR 是一种使用符合ANSI 标准的C语言来开发微控制器MCU程序的一个工具,它有以下几个主要特点:ICCAVR 是一个综合了编辑器和工程管理器的集成工作环境IDE,可在WINDOWS 下工作。
5.2 电机控制电路设计
本设计采取PWM调速控制电动机转速,采用Mega48的16位定时计数器1来产生PWM波形,相位与频率修正PWM 模式,可以产生高精度的、相位与频率都准确的PWM波形。本电路采用H型驱动电路改变电机电枢电压的极性,实现电机的正反转,用单片机产生的PWM脉冲波形触发H桥的功率元件,实现对电机的斩波调速。如图4所示:A路PWM从PB1输出接L298的IN1,同时经反向器接IN2;B路从PB2输出接L298的IN3,同时经反向器接IN4。L298的输出OUT1、OUT2接一个电机,OUT3、OUT4接一个直流电机,PWM波经L298放大后驱动电机进行调速。
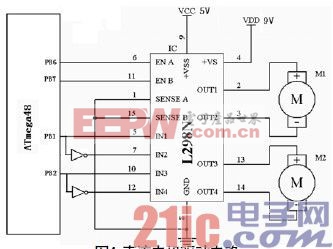
图4 直流电机驱动电路
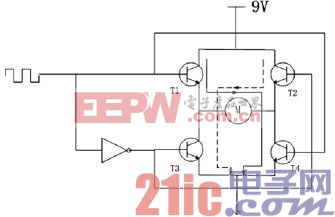
图5 H桥工作原理图
L298里面有两组H桥,可以驱动两个小型直流电动机。如图5所示每一组H桥有四个三极
管,当输入为高电平时,T1、T4导通,电流流向如图中实线所示,假设电机为正转;当输入为低电平时,T2、T3导通,电流流向为虚线所示这时电机反转。那么在一个周期内的直流平均功率为正,则电机正转,直流平均功率为负,则电机反转。比如说:80%占空比时,电机正转;20%占空比时电机反转;50%占空比时电机停转。
6 小结
本设计采用性价比较高的AVR单片机ATmega48作为控制器,设计了一款简易的灭火机器人模型。本设计的灭火机器人还存在一定的技术问题,机器人的活动范围受到局限,反应不灵敏以及干扰问题。在探测火源以及灭火方式还有很大的完善空间。而且,一种灭火机器人不可能适用于不同的建筑场合。因此,必须研究不同建筑结构特殊性,有针对性的研制相应的灭火机器人,以使灭火机器人发挥最大的作用。











评论