
Matlab GUI的上位机与智能车的两种实时通信
3 单片机与PC机串行通信
3.1 设计思想
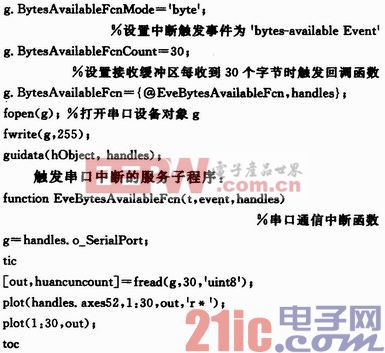
MCA8HCS12G128单片机的软件设计需要实现对程序的初始化、接收与发送串口信号、速度和位置数据的采集等功能。为了保证上位机采集数据的可靠性和稳定性,防止出现丢包事件,在通信过程中约定了双方的握手方法。在程序初始化以后,等待fwrite命令发送的握手信号0xFF。当单片机第一次接收到的信号为0xFF时,则握手成功,并开始运行电机和激光头等子程序。在实验过程中发现存在发送的第一组数据第一个字节丢失的现象,为了增强数据的可靠性,首先判断数据包的前两个字节是否为0xFF,是则剔除相应字节,分离出有效的数据,再在回送的速度、激光传感器的数据中嵌入两个字节的握手信号0xFF,Matlab接收到串口的数据后进行相应的处理。智能车控制器通信的总程序流程如图3所示。本文引用地址://m.amcfsurvey.com/article/170624.htm

数字通信相关文章:数字通信原理
通信相关文章:通信原理











评论