
基于Simulink的嵌入式网络化控制仿真实现
延时特性分析及补偿方法
网络化控制系统的分析和设计比传统的点对点控制复杂的主要原因在于网络延时。在采用以太网的分布式网络化控制系统中,虽然以太网传输的实时性随着快速以太网和交换式以太网技术的发展得到了解决,但由于有限的网络资源被网络中的多个节点共享,使控制系统中的实时信息不能及时传送,加之包交换的网络间延时的不确定性,严重影响了系统的控制性能,甚至造成系统的不稳定。因此,网络化控制仿真平台要提供对真实网络环境的模拟必须首先明确网络延时的特点。
延时分布特性
往返时间round trip time 简称为rtt,是指小数据包从网络源节点A 发出,经网络到达目的节点B 后又返回到A 所用的时间。本文在实验装置所访问的广域网环境下进行rtt测量,以便从测量数据中分析得到延时分布特性。测量使用仿真系统的延时测量模块。该模块采用Van Jacobson 提出的高精度测时思想,用Simulink系统函数实现。
图4 是在网络处于正常条件下,实际测得实验装置所使用的广域网的rtt 分布。测量进行了1000 次,其均值为0.3877s,均方差为0.0106s。从频域角度分析,得到的功率谱密度如图5 所示。根据带限白噪声定义,即功率谱密度函数仅在某些有限频率范围内取异于零的常数,为理论分析的简化,将测得的延时近似为低通白噪声,这可由低通白噪声对功率谱密度的定义
![]()
可知。Srinivasagupta 也指出将大多数的网络延时近似为白噪声是合理的。
相对于具有较大截止频率,即时间常数较大,动态响应较慢的系统,由于允许的采样周期较长,该数量级的网络延时对控制系统的影响也许可以忽略,但当被控对象为快速响应系统时,网络延时的数量级很可能等于甚至远大于控制系统的采样周期,此时必须对延时进行补偿以保证控制系统的稳定。

延时补偿方策略
由于延时的不确定性,在网络化控制中,无法保证在一个采样周期内恰有相应时刻的信号到来,可能在该采样周期没有收据,即空采样,也可能收到多个收据,即多采样,还可能收到被延时的数据,即延时采样。为此,仿真系统对网络化控制系统的前向和反馈通道的延时分别进行了补偿。
信息在网络间传输的格式为:时间戳+对应的数据值。由于仿真系统提供了同步机制模块,为简化编程,可在发送时间信息时,只发送相应的周期索引值而非硬时钟值。图6 描述了仿真系统采用的网络延时补偿策略。
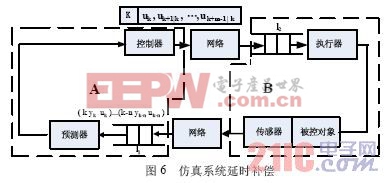
为和传统的数字控制系统一致,仿真系统中的控制器,传感器和执行器节点均采用时间驱动方式,即设备工作由时钟控制,按照一定的周期来执行操作。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)








评论