
基于Gene8310的嵌入式家庭服务机器人系统设计
针对家庭服务机器人的任务要求,将机器人控制系统分成以下模块:嵌入式系统、摄像头、扬声器、麦克风、人脸跟踪系统、语音识别系统、无线通讯系统等。嵌入式系统采用Gene8310微型主板作为硬件平台,运行Windows操作系统;人脸跟踪系统、语音识别系统是运行在Windows操作系统下面的基于VC的程序;无线通讯系统是基于Q2501B的GPRS通讯模块;动作控制是基于PIC16F877A的7自由度伺服电机的控制;行走控制是双行走轮差动控制的驱动方式。
2.2 动作控制系统设计
家庭服务机器人的动作主要是让机器人模拟人的手臂关节,以便机器人实现人的一些动作,本论文设计的机器人手臂有三个自由度,分别模拟人体的肩关节、肘关节,可以实现抬臂、弯臂、摆臂等动作,一个手臂三个自由度的组合,可以实现握手、挥手、招手等动作,两个手臂的组合又可以实现鼓掌、拥抱等人的基本动作。
2.3 行走控制系统设计
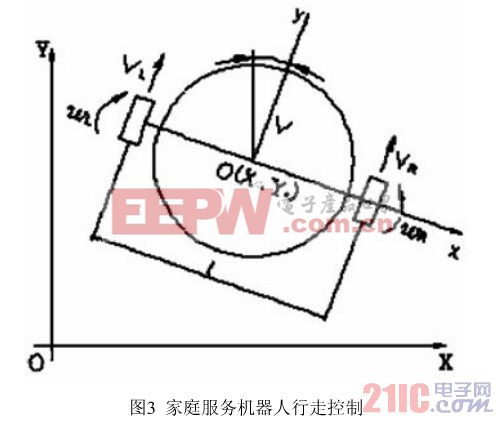
家庭服务机器人行走控制系统采用的是双行走轮差动控制的驱动方式,机器人的模型如图3所示。这里我们假定机器人和地面之间是纯滚动的,行走轮只旋转不打滑,得到运动学模型公式:
式中: (x, y)为机器人中心O点的参考坐标;θ为机器人中心O点的运动方向角;ν为机器人中心O点的速度;ω为机器人差动转向的角速度。
根据上述数学模型,结合机器人的结构特点,把机器人的运动简化为与地面接触的两点运动,两点的位置决定了机器人的位置,两点的运动状态决定了机器人的运动状态。图3中XOY为全局坐标系,xoy为机器人坐标系,O为速度瞬心。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)







评论