
智能车电磁检测及控制算法的研究
图3所示为车模与赛道位置示意图,车体前部即为路径检测模块。α为车体相对于导线的偏移角度,d为车体相对于导线的偏离距离(垂直与车体中心线的横向距离)。在车模行驶的过程中,每个电感线圈距离导线的距离不同,夹角也不同,因此输出的感应电动势大小不同。本文引用地址://m.amcfsurvey.com/article/179065.htm
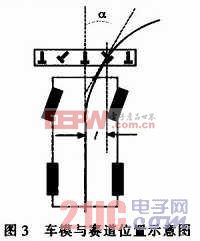
图4所示为本设计中电磁传感器的布局。每两个轴线相互垂直的电感作为一组传感器,水平放置。

设每组传感器中,前端电感输出的感应电动势为Ey,后端电感输出的感应电动势为Ex,则:
1)对于1号位的两个电感,计算![]() ,可求得电感所处磁场的导线方向,即车体相对于导线的偏移角度α;
,可求得电感所处磁场的导线方向,即车体相对于导线的偏移角度α;
2)2,3号位的电感同车体中心线成45°夹角,用来确定α值的正负,即导线所处的象限。当2号位检测到的磁场强度明显大于3号位时,以2号位前后两个电感的电动势之比![]() 作为方向的参考:当
作为方向的参考:当![]() 时,α为负(导线处于第二,四象限),
时,α为负(导线处于第二,四象限),![]() 时,α为正(导线处于第一,三象限);3号位的判别方法与之相反。
时,α为正(导线处于第一,三象限);3号位的判别方法与之相反。
3)计算1号位前后两个电感感应电动势平方和之根![]() ,再乘以比例系数λ,得到
,再乘以比例系数λ,得到![]() ,即为车体偏离导线的距离。
,即为车体偏离导线的距离。
4)4,5号位的电感用来辅助判断d值的正负(左为负,右为正),方法同导线方向的判别类似。
由于实际赛道中磁导线的电流在50~100 mA之间,因此每次上电智能车都要有一个15 s的自学习的过程:将车体贴近赛道做左右摆动(不超出赛道范围),检测出不同的车体姿态下电感感应电动势的极值,并由此确定值。实验测得传感器模块距离的检测精度为1.5 cm,角度的检测误差在±5°范围内,前瞻距离可达到25 cm。实验的结果表明,这样的传感器布局对于导线的检测是比较准确的,而且它可以预测出导线的方向趋势,便于前瞻性控制算法的设计。
2 整体控制系统的设计
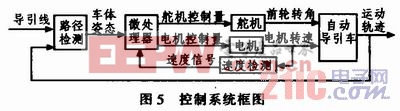
智能车的控制结构是以微处理器为核心。电机控制量、电机转速和速度检测构成一个闭环,该闭环的输入为路径检测后微处理器给定的速度值,输出控制后轮驱动;舵机控制量构成一个控制系统通道,其输入为徽处理器给定的转角值,输出控制前轮转向:最后以运动轨迹作为路径检测反馈控制器的输入,其与导线比较确定车体姿态从而构成一个大的闭环控制系统。智能车的控制系统框图如图5所示。
3 转向控制算法的设计
对舵机的控制,要保证在任何情况下,总能给舵机一个合适的偏移量,保证小车能始终连贯地沿导引线行驶,防止出现大的抖动。
舵机转向是一个双输入单输出的控制器:输入量为偏移角度α及偏离距离d,输出量为舵机的给定值。通过实验得出,系统可以依靠单个输入量来完成控制的舵机,譬如以偏移角度α作为输入,不考虑偏离距离d的作用。这种情况下系统虽然能够运行,但是控制的精度及响应速度较低。同样,在仅依靠偏离距离d的时候,系统的稳定性较差,会出现比较明显的抖动。因此,需要综合分析这两个输入量之间的耦合关系,实现更为精确的控制。















评论