
一种四自由度码垛机器人机构和运动分析
3 ADAMS运动模拟
ADAMS是对机械系统的运动学与动力学进行仿真计算的经典软件。为进一步展示码垛机器人的运动空间形式,本文将solidworks建立的码垛机器人三维模型导入ADAMS,对机器人进行了运动模拟,其最大运动空间剖面轨迹如图4所示,该轨迹线反应了一般码垛机器人的最大运动空间结构。

在完成上述图4-(b)的模拟中,2轴和3轴Motion驱动角速度如图5所示:
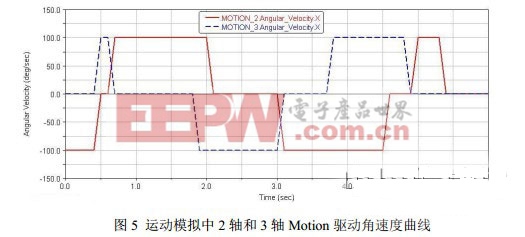
结合图4和图5可进一步看出,ER300机器人特定的结构使其在运动过程中,大小臂之间没有复杂的耦合运动,简化了机器人运动方式及控制方法。
仿真结果也显示,在机器人运动过程中,大臂副杆在某些位置承受了较大的拉力。由理论分析可知,当转矩M不变,大臂副杆的拉力F与其关于3轴的力臂L成反比例函数,从而在某些特定位置,力臂L的较小变化会导致F大幅变化。因此,在机器人设计过程中要充分保证大臂副杆及其组件的强度与刚度,以保证机器人的可靠性和准确性。
4 运动空间数值计算
为准确计算并验证码垛机器人的运动可达空间,本文采用了ER300码垛机器人的基本参数:R=400mm,H=835.5mm,L2=1250mm,L3=1300mm,W=225mm.利用matlab编程计算并绘制了码垛机器人手腕体D点的理论运动可达空间剖面,如图6所示:
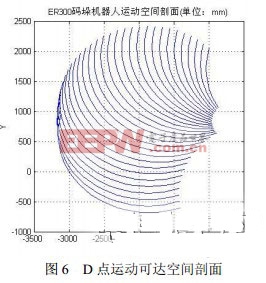
计算结果显示,当时,机器人末端中心D点达最大工作空间最高点;当时,机器人末端中心D点达最大工作空间最低点;当时,机器人达最大臂展位置,这三点位置决定了码垛机器人本体分别在垂直和水平方向上的最大码垛范围,是衡量码垛机器人工作性能的重要参数。
再与ADAMS模拟的运动轨迹点坐标计算结果对比,并分别考虑ADAMS模拟的轨迹求解精度误差和离散计算方法的误差因素,模拟结果和理论计算结果基本和设计目标一致,均能够达到最大臂展为3175mm,Y方向搬运高度3104mm的要求。
分别与ABB的IRB660-180、KUKA的KR180-2PA和KAWASAKI的ZD130S工作空间对比,结果显示在ER300的基本参数下,运动空间与上述同类机器人基本重合,能够达到市场的一般需求(臂展、码垛高度等)。
5 结论
本文通过对ER300码垛机器人机构的分析,展现了一般码垛机器人的杆件关系、运动形式;说明了该种机构优点的同时,也点出了其在设计过程中需要注意的问题;分别模拟和计算了码垛机器人的最大运动空间,验证了机器人的运动形式。




评论