
DSP在六自由度电磁跟踪系统中的应用
从这部分电路可以看到,DSP不直接与数/模转换模块接口,而是利用CPLD屏蔽A/D转换的初始化以及读写操作过程,并将两个A/D 转换单元通过FIFO缓存后映射到DSP的10空间。这样DSP可以在未知ADC控制方式的情况下,通过定 时访问外设的方式来获得4个通道的模数转换后的数据。这种方法大大提高了DSP的工作效率,而且当系 统要求增加ADC的数目时,不需要改变电路,极大的提高了系统的可扩展性。
电路中两片A/D除了片选控制信号以外其 他的数据总线以及控制总线全部是分别连在一起 的。将片选控制与其他控制分开的原因在于:A/ D芯片的初始化以及转换过程需要同时完成,但 是数据的输出需要分别完成,否则会出现总线冲 突。ADC时序控制框图如图5所示。
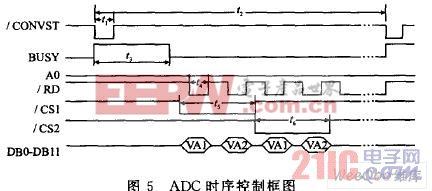
AD7862最高采样率可到250 kHz,然而根据 正弦信号抽样的基本原则,抽样率应为原信号的 整数倍,又考虑到对抽样后的数据做DFT运算时 希望数据点数N 最好为2的整次幂,因此设计系 统实际采样率为128 kHz。
3系统的软件设计
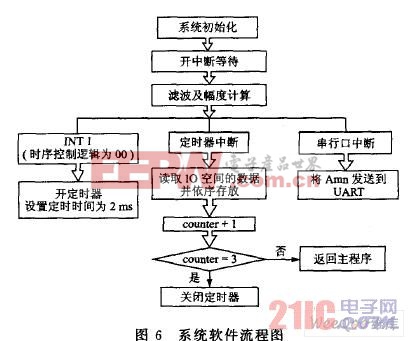
TMS32O5416的软件设计主要包括初始化程 序,主程序,外部中断程序,定时器中断程序和串 行口中断程序。初始化程序完成DSP及外围芯片 的初始化,主程序将采集到的数据滤波后进行 FFT运算提取幅度值。串行口中断程序完成接收 矩阵的发送。系统软件的工作流程如图6所示,当模拟信号进来并开始采样时,即发射部分的时序控制逻辑为OO时,产生INT1,DSP开启定时器中断并设置定 时器的值为2 ms。定时器中断后,DSP从FIFO 中读取前2 ms时间段内采集到的所有数据,













评论