
MEMS、MCU和传感器融合的平衡
另一种方法是将MCU与一个或多个传感器相集成。飞思卡尔称之为“智能传感器集线器”,并曾在2011年推出MMA955x系列器件时介绍了这一概念。其他厂商(特别是Bosch和ST)近期也推出了配备了集成式MCU的设备;飞思卡尔预计将于近期推出另一款产品。
本文引用地址://m.amcfsurvey.com/article/192731.htm当选择智能传感器集线器时,您希望查看厂商是仅仅将MCU连接到现有传感器上,还是为传感器融合优化系统。一般来说,这是“优化功率”的代名词。让我们来看看图3所示的系统背景中的一些优化。
内存:智能传感器集线器通常从闪存运行。就芯片面积和成本而言,闪存和RAM都是昂贵的资源。您是否有足够的内存来完成这项工作?另外,您支付的内存超出了您的需求吗?RAM/闪存比例适合您的应用吗?通常来讲,融合算法需要的RAM比基础控制应用需要的多。每三次或四次闪存采用1KB的RAM可能适合融合应用。人们通常想要更多,而不愿意得到的更少。
闪存往往是系统中速度最慢的存储器。闪存接入是否妨碍了您的系统性能?或者您是否有某类闪存高速缓存器或面向未来的缓冲器?
时钟域:当传感器集线器处于低功耗状态时,负责与主系统通信的从端口接口是否能够正常运行?低功耗状态有多低? 理想情况是能够关闭集线器上的所有时钟。这意味着您的串行端口需要外部计时。大部分标准MCU将串行端口时钟看作数据,以2倍或4倍的数据速率来采样数据。这会消耗功率,但在数据穿过集线器内的时钟域时保证不会出现问题。为集线器优化的MCU不会强制您选择这个选项。
时钟频率:您将系统从慢时钟速率切换到快时钟速率或者再切换回慢速率的速度有多快?MCU经常使用锁相环路功能来执行慢时钟频率乘法运算,达到实用范围。锁相环路运行良好,但会消耗(根据传感器标准)大量功率,也需要花一些时间来锁定最终频率。图3所示系统使用一个按需在两个频率之间切换的振荡器。
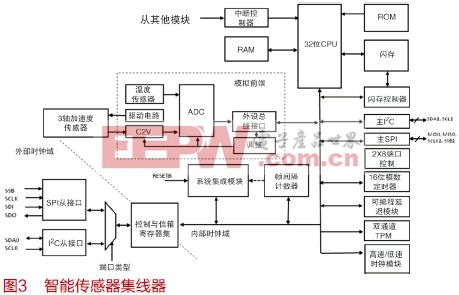
内部派生时钟经常随着温度产生1% -3%变化。针对不同应用,您可能对此并不在乎。但如果您在乎(如果您正在整合速率,您就会在乎),可以考虑采用缓慢外部时基,将其输入到一个片上定时器。根据内部时钟周期测量外部时钟,并根据观察到的比率,动态地调整帧速率。
采样率:您如何管理采样率? 图3所示系统包括确保恒定帧速率的定制“帧间隔计数器”,与高频/低频操作模式的时长无关。如果您的设备有晶体振荡器,频率(32kHz)是否适度,是否会消耗过多功率?
模数转换器精确度:您的转换结果的分辨率有多少有效位? 转换精度与转换速度之间是否平衡?
硬件加速器:您的智能传感器集线器是否提供了识别主要运动事件(在硬件方面,无CPU干预)的所有选件?引擎的通用性如何? 同样,如果硬件中实施了一部分算法,这些算法是否能够通用,还是要求您采用特定的融合库?
其它设备:您的智能传感器集线器在管理其它设备方面有没有限制? 您是否有足够带宽、用于缓存的RAM,以及用于计算的MIPS?
开放性:您的集线器是否是固定的功能,或者您是否能够定制其上的代码? 是否有实现这些目的所需库和工具? 如果采用Android操作系统,是否需要提供驱动程序和定制HAL(硬件抽象层)? 如果采用Windows 8操作系统,集线器制造商是否提供HID/I2C或HID/USB接口?
一般来说,所有这些因素将会推动系统设计人员从下面两个方面来考虑解决办法:最大限度地减少依靠更高级的软件功能实现融合的传感器数量;或者采用传感器制造商打造的高度集成的传感器子系统和参考设计,实现轻松集成和定制。

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理











评论