
汽车主动悬架的单神经元自适应控制
选取系统状态变量X、输入变量U和输出变量Y分别为本文引用地址://m.amcfsurvey.com/article/197811.htm


三、自适应神经元控制器的设计
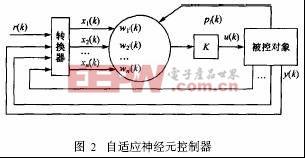
文献[6>提出了一种适于控制的自适应单神经元模型,它既可以利用神经网络的优点,又能适应于快速过程实时控制的要求。其相应的自适应神经元控制系统如图2所示。

四、仿真计算及分析
根据以上自适应神经元控制算法,利用Matlab615中的Simulink510工具箱,通过搭建系统模块来实现模拟仿真,所得自适应神经元控制器的Simulink仿真模型见图3。为证实其减振效果,还与被动悬架、传统的PID控制悬架进行了性能对比。











评论