
基于LabVIEW的车辆监测系统的设计
摘要:基于National Instruetionals公司的LabVIEW虚拟仪器技术,设计和搭建了车辆监测系统。利用车载GPS/北斗定位接收系统获取定位信息,通过GPRS将定位信息传递至监控台,监控台将信息汇总后返回至每一车辆,将所有车辆的位置信息共享并显示。监测及显示软件通过LabVIEW编写,以期实现车辆运行状况的实时监控。实验结果表明,该系统能够精确有效地监测和显示车辆的运行状况。
本文引用地址://m.amcfsurvey.com/article/201610/309578.htm智能交通系统(Intelligent Transportation System,ITS)是未来交通系统的发展方向,结合最新的信息、控制和传感等技术,建立实时、准确、高效的综合交通运输管理系统。目前我国的智能交通研究,水陆空3个方向都主要集中在提高整体运输效益和服务水平上,用于满足运输工具使用者定位导航以及运输企业、交通管理部门监测交通情况等的公众服务需求。
汽车车载监控单元是车联网的终端和网络节点。在常规工作状态下,车载监控单元依靠公共无线网络按照设定的路由直接将数据信息等发送至区域控制中心(数据中心)。交通工具与数据中心之间是一个单向的连接。即数据中心可以获知所有车辆的信息,但车辆之间却不能互相知道彼此的位置。本文将实现数据中心整合区域内车辆位置信息实时广播至区域内所有车辆,使得定位信息共享。为保证每个移动节点的数据能够及时传输,可采用移动蜂窝网为通信载体,传输车载GPS/BDS定位接收系统提供的定位信息,支持移动节点信息能够有效地及时传输。
1 系统总体设计方案
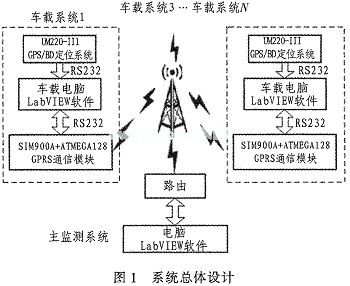
系统结构框图如图1所示,分为主监测系统和车载系统两部分。车载系统由车载定位系统、监测系统、通信系统3部分构成。主监测系统由监测系统和通信系统构成。车载系统完成定位信息的采集并通过GPRS传送至主监测系统,主监测系统整合所有车载系统在一定时间内发送过来的信息,显示于LabVIEW界面并将其广播至车载系统。车载系统随后分析收集到的数据并显示于LabVIEW界面上。
2 车载系统设计
车载系统由车载GPS/BDS(北斗)定位接收系统、监测系统、信息传输系统3部分构成。
2.1 车载定位系统
车载定位系统采用了和芯星通的UM220-Ⅲ模块。UM220-Ⅲ模块是GPS/BDS双接收系统模块。其采用GNSS多系统融合、卡尔曼滤波等优化算法及和芯星通Ultra—Sense高灵敏度设计,在各种复杂环境下能够保持出色的捕获跟踪能力和可靠的连续定位结果。
GPS/BDS的定位信息包含的内容很多,在本系统中,由于只需要使用经度、纬度以及经纬度方向等信息,在设定时,可以将其他信息均设置为不输出。
文中针对运行中的车辆进行监测,由于车辆的不停运动,所处的网络环境不断地变化,因此能够在弱信号条件下提供优异的捕获、跟踪灵敏度,并保持接收机定位的连续性和可靠性就显得很重要。UM220-Ⅲ模块通过串口(可用USB转串口)与车载PC相连,将定位信息传输给车载PC,并由车载PC进行分析和转发给通信模块。
2.2 通信系统
车载PC将接收到UM220-Ⅲ模块发送的定位信息,由LabVIEW软件进行分析和整合,并通过另一个串口(可用USB转串口)发送至通信系统。SIM900A模块由ATMEGA128单片机控制,通过无线公共网络按照设定的路由与主监测系统通信。
2.3 车载PC
车载PC上的LabVIEW中预存了一定的地图信息,因此,只要有车载定位系统的定位信息,就可以将自身的位置情况显示在LabVIEW的界面上。除此之外,通信模块还接收来自主监测系统整合的包含区域内其他车辆位置情况的信息。因此,在车载PC的LabVIEW界面还将显示其他车辆的位置情况。
3 主监测系统设计
主监测系统主要是由一台有固定IP的PC组成。PC依靠公共无线网络接收来自于车载通信系统发出的信息,由LabVIEW来实现其监测和通信功能。
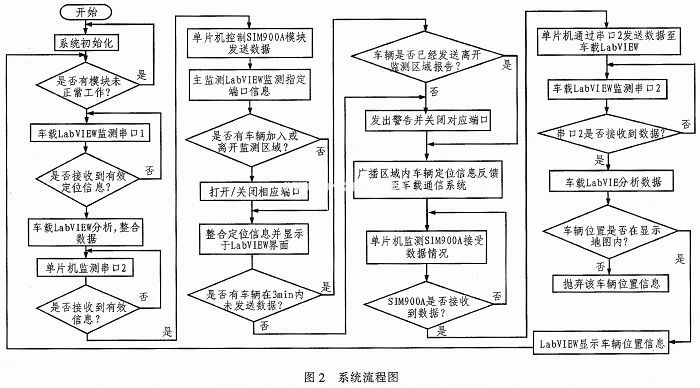
具体系统流程图如图2所示,其中,车载PC串口1与UM220-Ⅲ模块相连接,串口2连接通信模块。每一个车载通信模块与主监测系统通信时,均要指定端口。
4 软件设计部分
4.1 LabVIEW串口程序
串口作为计算机最经典传统的通信接口,同时也是被最广泛使用的接口,LabVIEW也集成了串口通信功能。因此,文中的有线通信接口均采用串口,或是USB转串口。
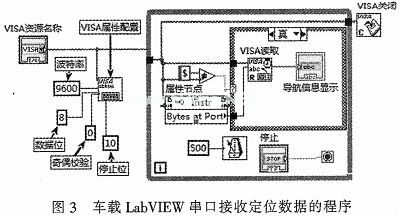
LabVIEW的串口通信函数选板中包含了串行通信常用的功能模块。本系统主要使用到VISA资源名称(Resource Name)、VISA配置函数(Configure Serial Port)、VISA读取函数(Read)和VISA关闭函数(Close)。VISA配置函数主要用于配置串口的初始化。本系统中使用的串口通信程序配置的波特率为9600,数据位为8位,奇偶偶校验位为0位,停止位为1位。
本系统中,由于车辆数量不定,且各车辆发送数据到主监测系统的LabVIEW软件的时间不一,程序中的串口均采用被动接收方式接收数据。数据位设为8位,即程序设置为
每次从串口读取1字节数据,当程序判断出该字节为有效数据(帧头“$”)时,就开始将之后的数据进行读取、存取、拆分、计算、转换等一系列处理,程序结束时,利用VISA关闭函数将占用的串口资源释放掉。
车载PC安装的LabVIEW软件监测串口接收数据的程序如图3所示。
4.2 LabVIEW的UDP通信
文中车载系统与主监测系统是依靠无线公共网络进行通信的。具体到LabVIEW软件中,则是利用了其UDP通信功能。
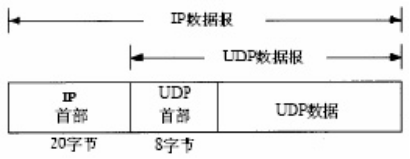
TCP/IP(传输控制协议,网际协议)作为网络通信的标准。是迄今为止使用最为广泛的协议。UDP方式是无连接通信,采用广播的方式来发布数据,特别适合于一点对多点的通信,且其响应速度较快,适用于文中的情况。
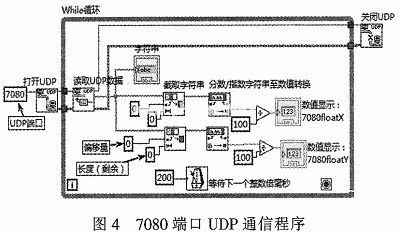
“写入UDP”函数需要指定计算机与发送端口,文中制定计算机为主监控系统PC的IP/环回IP(默认,无需配置),发送端口为车载通信系统ATMEGA128单片机程序中指定的端口。以“7080端口为例,UDP通信程序如图4所示。
4.3 车载系统LabVIEW设计
车载系统的LabVIEW主要功能有两个:1)接收来自自身定位系统的定位信息,分析整合,并实时地将之显示在界面上;2)接收主监测系统发送的其他车辆定位信息,判断其位置是否在本车所在地图之内,如果在,则实时显示;不在,则抛弃信息。
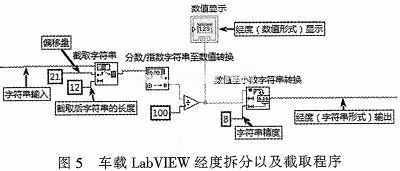
车载LabVIEW要将定位数据整合拆分,主要分为经度和纬度两个方面,两个VI程序基本类似,本文中列举经度拆分截取的程序,如图5所示。车载LabVIEW的VI子程序中,判断其他车辆是否在本车所显示的地图范围之内的程序比较简单,只是数据处理和比较大小,这里不再一一列举。
4.4 主监测系统LabVIEW设计
本系统中车载通信系统的SIM900A模块是由ATMEGA128单片机控制的。在其发送数据时,需要选定接收端的端口。因此,主监测系统的LabVIEW可以清楚地分出每一个定位信息属于哪一个车载系统。
主监测系统的LabVIEW需要监测所有车辆的运行情况,其主要功能有三点:1)实时显示所有车辆的位置信息;2)在有需要的时候,显示所有车辆的近期路线图;3)能够将某一车辆的运行情况单独显示。
主监测系统的程序和车载系统程序类似,主要的区别在于可以显示车辆的近期路线图。只需要添加一个“接受缓冲区”来存储车辆近期位置信息即可。图6为车载LabVIEW软件界面显示的一部分。其中,蓝色、红色、灰色三点为区域内其他车辆,绿色为本车近期行驶路线图。本文的实验在上海交通大学校园内进行,为了方便实验,取车载系统数量为4,在实际运用中,可以按照情况增加。

5 结束语
本系统采用了NI公司的LabVIEW作为主要的监控和显示软件,在车载软件以及主监测软件上均实现了对于区域内车辆位置信息的共享和监测。车载系统和主监测系统都只需操作一个界面就能够实现定位数据的实时采集、处理、存储和显示。这使操作得到很大的简化。
文中所阐述的系统具有成本低,操作简便,自动化程度高,扩展性和移植性强等特点。在此基础上,今后可以对系统进行进一步改进,使之更为实用。例如,在车辆上安装报警器等,可通过本系统将警报传输至监控中心或者对区域内其他车辆发出预警信息。或者在车载LabVIEW程序上设计文字信息/语音信息的输入,使得车辆可以直接与监控中心或区域内车辆进行交流等等。此外,随着居民生活水平的提高,车辆的使用将更加频繁,车辆之间的连接也显得更为重要。开车的时候不方便打电话或使用其他的交流工具,文中所提出的方法也可为这方面的研究提供一些参考。















评论