
机器人教程3:直流电机驱动及L298N模块
这一节我们主要介绍H桥电路,后面的章节我们会专门介绍到PWM调速问题。
3、H桥电路
电机做好后后引出两个极,如图5所示,给两个极能电就能够实现其转动,而改变其电源极性刚可以实现换向。

图5减速电机及电路图
前面我们说过必须要解决驱动力不足和换向问题,设计一般会采用两种方法,一是设计由分离元件组成的驱动电路实现,另一种方法则是采用专用的驱动芯片加以实现。由于专用的驱动芯片由于结构简单、价格便宜、可靠性高等特点,因而被广泛的应用实现电机的驱动。电机的驱动芯片很多如L298N、BST7970、MC33886等,这里我们介绍智能机器人中比较常用的LM298N驱动模块,BST7970、MC33886一般在电机功率比较大的场合适用。在介绍LM298N驱动模块之前,我们先介绍一下H桥电路,需要说明的是时,在下面的电路由于内部采用了三极管,三极管本身起到放大的作用,即增大了驱动电流,所以在下面的讲解中我们主要侧重讲解如何实现换向功能。
H桥电路可以用如图6来表示其原理:
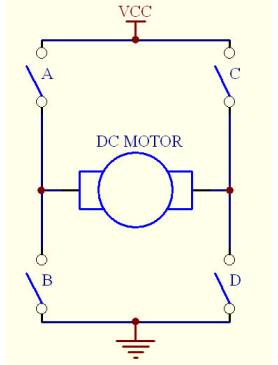
图6 H桥简单电路
从图中可以看出,其形状类似于字母“H”,作为负载的直流电机像“桥”一样架在上面,所以称为“H桥驱动”,4个开关所在的位置就称为“桥臂”。
从图中可以看出,假设开关A、D接通,电机正向转动,而开关B、C接通时,直流电机将反向转动,从而实现了电机的正反控制。当然实际应用中我们还可以得到其它两种状态:
1)刹车,即将A、C或B、D接通,则电机惯性转动产生的电动势将被短路,形成阻碍运动的感应电流,开成“刹车”作用。
2)惰行,4个开关全部断开,则电机惯性所产生的电动势将无法开成电路,从而也就不会产生阻碍运动的感应电流,电机将惯性转动较长时间。
以上电路只是说明的原理,实际电路中我们通常将来四个开关换成三极管。如图7所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。由于H桥电路可以很方便的实现电机的正反转的驱动因而得到了广泛应用。
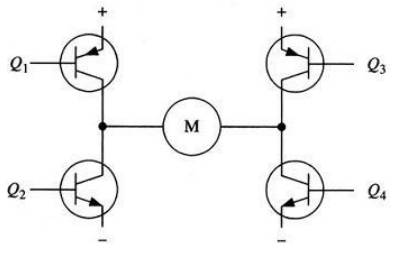
图7典型的H桥电路
要使电机运转,必须使对角线上的一对三极管导通。例如,如图图8所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定的方向转动。
图9所示为另一对三极管Q2和Q3导通的情况,电流从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动。
这里需要注意的是,电机一般会引出两个极,但并无正负之分,所谓的正反转也只是我们人为定义,具体要看实际的应用和安装情况。
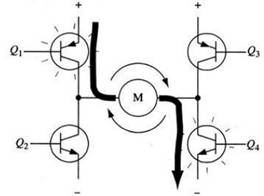
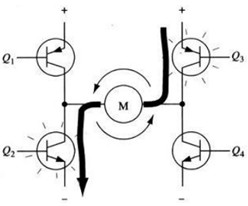
图8电机正转图9电机反转
驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要,如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极,此时电路中除了三极管外没有其它任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图10所示就是基于这种考虑的改进电路,它在基本的H桥电路的基础上增加了4个与门和2个非门。4个与门同一个使能导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供一种方向输入,可以保证任何时候在H桥的同侧都只有一个三极管导通。
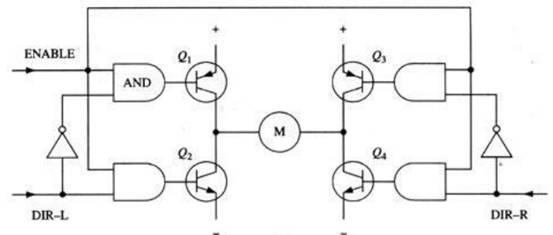
图10改进后的H桥驱动电路
采用以上方法,电机的运转只需要三个信号控制,如图11:两个方向信号和一个使能信号。如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机,如图6所示;如果DIR-L信号变为1,而DIR-R信号变为0。那么Q2和Q3将导通,电流则反向流过电机。
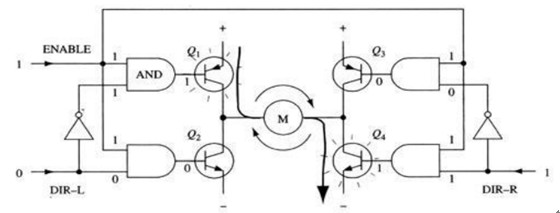
图11驱动电机转动时的信号示意图
4、驱动芯片选择时考虑的问题
H桥电路虽然有着许多的优点,但是在实际的制作过程中,由于元件较多,电路和搭建也较为麻烦,增加了硬件设计的复杂度。所绝大多数制作中通常直接选用专用的驱动芯片。目前市面上专用的驱动芯片很多,如上面提到的L298N、BST7970、MC33886等,但到底我们应该选用哪咱芯片呢,当然每种芯片有自己的优势,我们应该根据设计需要从价格和性能上综合考虑才行,这里谈三个方面。


评论