
解析光学防抖技术 算法及控制器性能突破为关键
光学防抖控制器设计
另一光学防抖系统关键技术为控制器设计,微型相机模块致动器大多采用音圈马达,但其具有磁滞效应、磨擦和参数时变等非线性特性,因此在控制器设计上必须考虑到非线性特性与实现时的运算负载。模糊逻辑控制器(Fuzzy Logic Controller)由于有运算负载低、不需要精确的受控系统数学模型、架构易实现并能有效的补偿微型致动器非线性等优点,近年来,工研院南分院所开发的光学防抖系统,成功地利用模糊控制器驱动音圈马达,藉以补偿经由手抖动信号估测器算法计算出来的位移补偿信号,达到防手抖效果。光学防抖系统如图4所示。
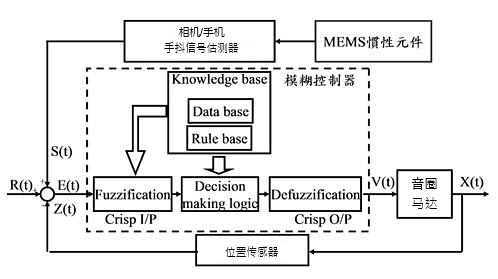
图4 光学防抖系统方块图
防手抖效能验证
目前市面上的防手抖效能主要分为1~4级。一般而言,防手抖效能级数是以安全快门速度的倍率来估算,安全快门速度等于焦距长度分之一秒的快门时间,举例来说,如果镜头的焦距是40毫米(mm),那么安全快门的速度就是1/40秒,使用低于安全快门速度拍出清晰的影像,防手抖级数就是安全快门速度的倍率;如果以安全快门速度是1/40秒为例,防手抖效能四级即代表相机在(1/40)×2^4=1/2.5秒快门速度下仍然能拍下清晰的影像,而影像的清晰程度则可以藉由稳定率(Stabilization Rate, SR)小于-15dB或ISO-12233,来鉴别影像锐利度(Image Sharpness)。
其中,稳定率实验主要是光学防抖系统在振动补偿与无振动补偿情况下,由固定快门时间条件决定拍摄测试目标,由拍摄照片上影像振动像素(高度)的比值来评定防手抖效能,稳定率图示说明请参考图5所示。
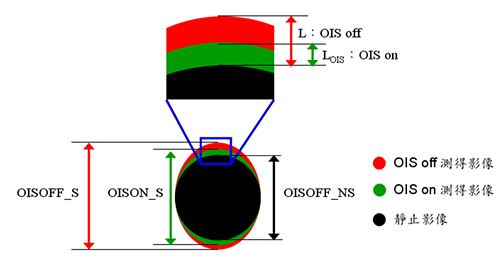
图5 防手抖稳定率定义图
OISOFF_S代表当光学防抖系统关闭且使用相机时,手产生抖动时所拍摄的影像像素(垂直高度);OISON_S代表当光学防抖系统开启,且手抖动产生时所拍摄的影像像素(垂直高度);OISOFF_NS代表当光学防抖系统关闭,且无手抖动产生时,即为OIS系统静止时拍摄的影像像素(垂直高度)。工研院南分院开发的适应性光学防抖系统已可达市售四级防手抖效能。
随着MEMS惯性传感器与手机相机模块新设计微型相机模块的发展,智能手机的动作感应与防手抖技术已日益重要。目前市面上微型相机模块多以音圈马达为主要致动器,随着智能手机与惯性传感器的技术发展,未来光学防抖技术将逐渐受到重视,将是市售高阶智能手机的功能之一。


评论