
基于CAN总线的汽车车身线束设计
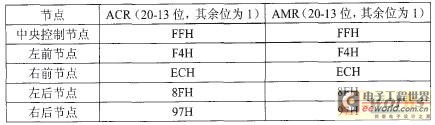
表2 节点验收滤波器设置
4 软件流程
中央控制节点的流程:见图3。变量STATE存储AT89C51的P1端口的状态。从P1.0至P1.7,程序顺序检查每一位是否与STATE的对应位相同。若不同,表示与该端口相连的开关发生状态变化,则根据变化的实际情况向总线发送报文。P1.7检查完毕后重新对P1.0进行下一轮检查。主节点的P1端口连接如表3。
表3 主节点的P1端口连接
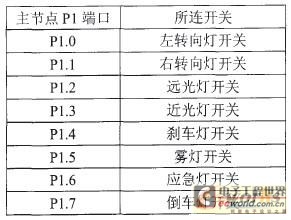
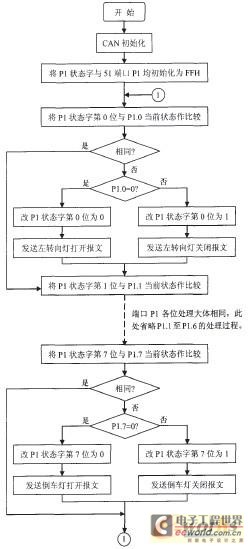
图3 中央控制节点流程图
其余节点的软件流程:程序不断查询状态寄存器(SR),监视RXFIFO中是否有新报文。若已收到新报文,首先根据报文标识符确定操作对象是哪个车灯;其次根据报文数据域的内容确定操作内容(开启/关闭/闪烁);最终实施操作并开始重新查询SR。其中,当使车灯(转向灯、应急灯)闪烁时,车灯每两次点亮之间的时间间隔为1s,即需要设定0.5s的延时,每到0.5s产生中断,中断服务程序将车灯的状态(P1.0)置反。由于AT89C51定时器无法产生长达0.5s的延时,程序使用定时器T0(定时0.1s)和变量N(初值5)配合使用产生0.5s延时。T0中断服务程序流程图见图4。
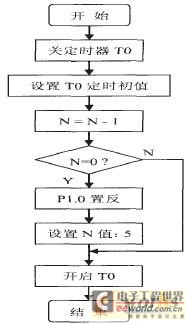
图4 T0中断服务程序流程
5 结束语
本实验成功地验证了将CAN总线技术应用于车身网络设计的可行性,CAN总线具有高速、可靠、实时性好、易于维护且工程造价低等优点,很好地解决了车身线束设计中的诸多问题。此外,还可以将安全气囊、悬架控制、牵引控制ABS等也加入车身网络,从而进一步简化车身线束和分布式控制。


评论