
微位移步进电机控制系统设计
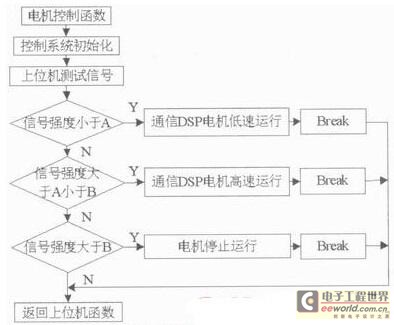
图5 系统控制程序流程图
4系统调试分析
4.1 PWM脉冲调制分析
图6为DSP输出的脉冲波形和其相对应的参数,通过修改参数值可以实现对脉冲频率的改变,并且可以通过DSP的点对输出控制电机的运行。通过调试分析能够很好地实现实验目的,持续地改变电机的运行状态。
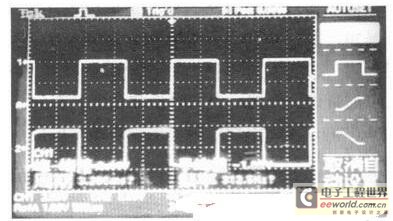
图6 PWM脉冲调试
4.2控制精度调试
本系统采用电机推动丝杆移动装置。丝杆采用的是滚珠丝杠,其为一种将回转运动转化为直线运动的理想的产品。
本系统选用的电机的最小步进角为1.8°故控制精度调试实际就是丝杆精度的调试,本系统选用的丝杆的额定扭矩为4N.m,最小角位移对应线位移为10μm.
系统总体调试:
现阶段系统调试结果为通过按键和程序控制能够很容易地实现电机的运行,能够通过计算得出电机的运行角速度并送液晶屏显示当前过程量。连接好丝杆的电机能够实现对传感器的推动。通过上位机对传感器信号强度的实时监测,系统能够基本满足设计目的,即系统能自动并有效地进行最佳信号点的检测,达到对物块的精确定位。
5小结
本系统从实际工程背景出发,旨在为实验室某项目提供技术支持。通过对系统的设计和调试能够从理论上实现项目目的,达到控制要求。通过硬件选型、软件设计、控制方案研究和实际调试分析,系统能够达到预期设计目的。然而本系统还存在一些问题有待解决,因本系统是配合项目其他模块而设计的,而其他模块尚在调试阶段,测试数据不精确,故电机系统控制方案设计模块还有待提高,将在后续项目进程中进一步研究。本系统当前研究成果能够适用于对控制精度要求不高的场合,因系统的控制方法比较简单、系统结构简洁,有一定的应用价值。


评论