
模拟仿真技术在智能网联汽车开发中的作用
0 引言
智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术的新一代汽车[1-2]。从国家产业发展层面以及市场需求来看,以车辆安全为核心目标的智能网联汽车技术必将受到越来越多的重视,国家智能网联汽车发展规划路线图指出,到2025 年,我国部分自动驾驶、有条件自动驾驶智能网联汽车将有望占当年汽车市场销量的50%,高度自动驾驶智能网联汽车开始进入市场(如图1~3)。根据国家智能网联发展规划,我们可以得出以下结论。
①智能网联汽车从单车智能化逐步向智能化与网联化融合的方向发展;

图1 智能网联汽车发展里程碑

图2 智能网联汽车总体技术路线图(1)

图3 智能网联汽车总体技术路线图(2)
②自动驾驶推动新型电子电气架构演进,软件定义、数据驱动汽车将成为未来发展趋势;
③智能网联汽车新技术在特定场景优先得到实践应用,随着技术不断验证与成熟,逐步向城市及郊区道路、高速公路等场景拓展;
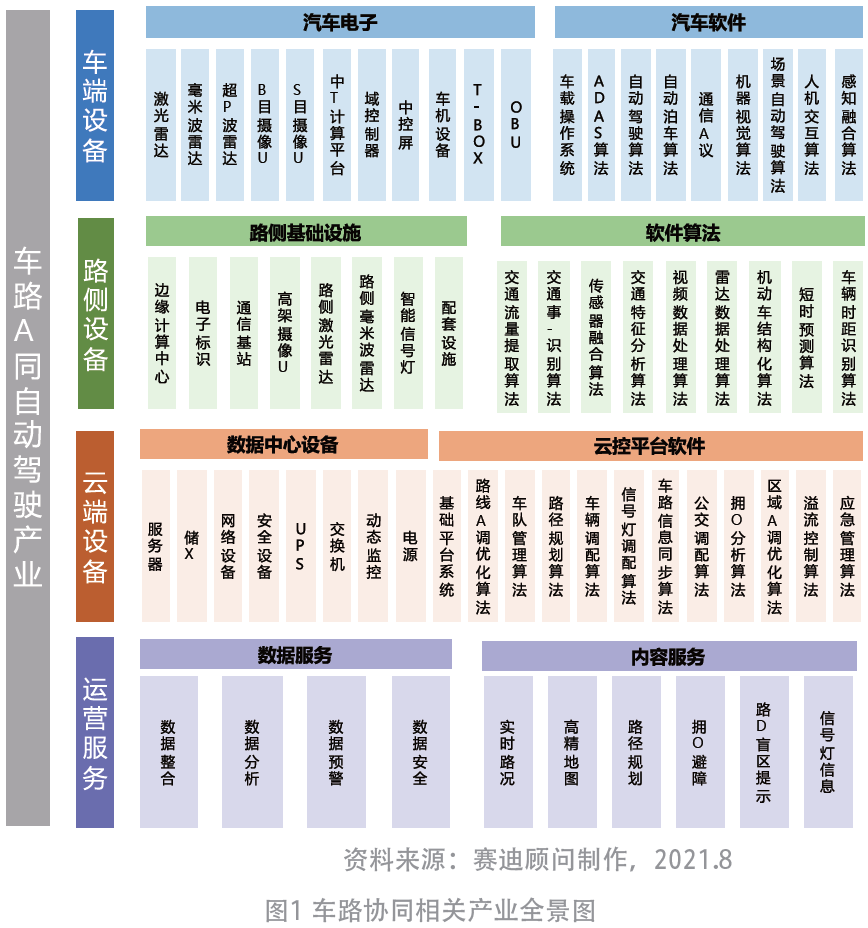
④未来路侧基础设施将加速智能化进程,连接云控平台与智能网联汽车将形成多级化智能网联交通体系。
1 智能网联架构及开发流程
与传统的燃油汽车和电动汽车不同,智能网联汽车的开发更加注重整车智能行驶性能开发和控制系统开发,核心是其控制系统中的控制策略、算法、软件、硬件、测试的开发。因此,非常有必要修正传统车的开发流程以满足智能网联车产品开发需要。
不同于传统的正向开发过程,V 模型强调控制软件、硬件开发的协作和速度,它将软硬件设计和验证有机地结合起来,使软硬件生命周期中每一个开发活动都对应一个测试活动,并且两者是同时进行的,可以在保证较高的软硬件质量情况下缩短开发周期(如图4~6)。

图4 智能网联汽车功能架构

图5 智能网联汽车系统架构

图6 智能网联汽车产品开发V字流程
针对智能驾驶的仿真测试同样必须满足汽车的V 字开发流程,具备覆盖MIL(模型在环)、SIL(软件在环)、HIL(硬件在环)、VIL(车辆在环)全开发流程的测试验证的能力。
2 模拟仿真技术的重要性
模拟仿真技术是智能网联汽车产品开发的要求,智能网联汽车在投产前,需要经历大量的道路测试验证才能达到产品商业化要求。采用道路测试来优化自动驾驶性能耗费的时间和成本太高。据美国兰德公司的研究,自动驾驶算法想要达到人类驾驶员水平至少需要累计177 亿公里的驾驶数据来完善算法;道路测试受到交通法规和保险理赔机制限制;极端场景和危险工况行驶的安全得不到保障,且工况难以复现;世界各国交通环境和规则不同,形成通用的产业链体系比较困难。到2025 年左右,仿真系统实现MIL 90% 场景覆盖、HIL 80% 场景覆盖;具备支持CA 级智能网联汽车测试验证的MIL、HIL 仿真测试系统,初步建立实车交通环境在环平台。到2030 年左右,完成仿真环境下的V2X测试工况和测试评价体系建立,实现MIL 95% 场景覆盖、HIL 90% 场景覆盖。具备支持HA 级智能网联汽车测试验证的MIL、HIL、VIL 仿真测试系统。《中国自动驾驶仿真蓝皮书2020》指出:目前自动驾驶算法测试大约90% 通过仿真平台完成,9% 在测试场完成,1% 通过实际路测试完成。随着仿真技术水平的提高和应用的普及,行业将通过仿真平台完成99.9%的测试量,封闭场地测试0.09%,最后0.01%到实路上去完成,这样可以使自动驾驶汽车研发更高效、更经济。因此,模拟仿真技术在智能驾驶开发中扮演着至关重要的角色。
3 国内外智能驾驶模拟仿真技术发展现状
德国自动化及测量系统标准协会(ASAM)是一家非政府的汽车领域标准化制定机构。截至2019 年,共有来自亚洲、欧洲、北美洲的295 家整车厂、供应商及科研机构加入成为会员。ASAM 推出的标准涉及多个汽车标准领域,包括仿真、车联网、测量与校准、诊断、自动化测试、软件开发、ECU 网络和数据管理与分析等。ASAM 启动的OpenX 包含仿真测试标准达到了5 项(如图7)。

图7 ASAM仿真格式标准
2019 年中国数据(中汽中心下属中汽数据有限公司)与ASAM 合作,共同组建C-ASAM 工作组,对ASAM OpenX 标准的仿真场景标准进行了拓展。

图8 智能驾驶仿真系统框架
4 智能网联模拟仿真技术应用
完整的智能驾驶仿真平台包括静态场景库、动态案例仿真、感知传感器仿真、车辆动力学仿真、路径规划决策算法验证等功能。总体来说,自动驾驶核心算法包括感知融合算法、决策规划算法、控制算法三大环节。相应的,智能驾驶仿真测试平台也应该具备完成上述三个算法的仿真测试能力,感知融合算法仿真需要高还原度的三维重建场景和精准的传感器模型;决策规划算法的仿真需要大量的场景库为支撑;控制算法的仿真需要引入精准的车辆动力学模型。虚拟场景构建:智能驾驶汽车的仿真测试,首先需要模拟构建出与真实世界一致的车辆运行场景,而场景的构建可以分为静态场景构建和动态场景构建两个层面。静态场景构建的作用是还原出场景中与车辆行驶相关的静态元素,例如道路(包括材质、车道线、减速带等);静态交通元素(包括交通标志、路灯、车站、隧道、周围建筑等)。最常用的手段是基于高精度地图及三维重建技术完成场景的构建,或者基于增强现实的方法来构建场景。广义的动态场景元素包括动态指示设施、通信环境信息等动态环境要素,以及交通参与者(包括机动车行为、非机动车行为、行人行为等)、气象变化(雨、雪、雾等天气状况)、时间变化(主要是不同时刻光照的变化)等。感知系统仿真:摄像头仿真的一般方法是基于环境物体的几何空间信息构建对象的三维模型,直白一点就是生成逼真的图像;毫米波雷达仿真:一般会根据配置的视场角和分辨率信息,向不同方向发射一系列虚拟连续调频毫米波,并接收目标的反射信号。不同车辆的雷达回波强度可使用微表面模型能量辐射计算方式,由车辆模型以及车辆朝向、材质等计算;激光雷达仿真:参照真实激光雷达的扫描方式,模拟每一条真实雷达射线的发射,与场景中所有物体求交;智能驾驶汽车在仿真测试中,需要借助车辆动力学模型模拟车辆来客观评价决策及控制算法。因为,复杂的车辆模型,可以保证车辆有良好的仿真精度,使被控制对象的反应更贴近真实世界。车辆动力学仿真:车辆动力学模型是基于多体动力学搭建的模型,其中包含了车体、悬架系统、转向系统、制动系统、动力系统、传动系统、车辆动力学系统、硬件IO 接口等多个真实部件的车辆模型。将这些被控对象模型参数化之后,就可以把真实的线控制动、线控转向系统和智能驾驶系统集成到大系统中共同做仿真测试。云加速仿真:仿真系统在进行仿真任务时需要访问大量采集或者生成的数据,并根据生成的数据利用CPU和GPU 资源对数据进行再处理并还原,或者对已经结构化的数据进行GPU 渲染再现。这就需要使用一种机制将仿真任务分配到多个机器上,并且让所有机器协同工作,这样做能够降低单个机器的性能需求,从而使得大规模仿真任务得以实现。
4 结束语
智能驾驶模拟仿真技术在智能驾驶产品开发中将发挥着越来越重要的作用,可以说该技术关系着智能网联产品开发的成败,在整车开发流程中,建立V 模型的控制系统开发流程体系,严格把控系统的策略、算法、软件、软件及测试质量,产品设计阶段加强智能驾驶仿真技术(MIL、SIL、HIL、VIL)应用,产品路试之前,进行VIL 测试,可以节省智能网联产品的开发周期,并可有效提升智能网联产品的开发质量。
参考文献:
[1] 狄佐龙.智能网联汽车仿真测试方法[J].汽车工程师.2019(4):35-38.
[2] 马文静.基于城市智能汽车的感知服务仿真系统的研究与实现[D].北京:北京邮电大学,2017.
[3] 柴琳果,蔡伯根,上官伟,智能网联智能车运动学仿真基础环境构建方法[J].华南理工大学学报(自然科学版),2018,46(1):72-83.
(本文来源于《电子产品世界》杂志2021年9月期)



评论