
基于PIC单片机的智能化逆变电源控制系统
软件设计的核心部分是SPWM信号的产生。本设计采用三角波作为载波、正弦波作调制波的对称规则采样法较为经典,得到一系列幅值相等但宽度不等的矩形波。然后使用在线计算的方法计算矩形波的占空比:
设N为载波调制波比,即有N=fc/fr.其中fc为载波频率,fr为调制波频率。本系统的SPWM信号由单片机产生,故载波频率可由下式计算:

其中,变量N代表分频因子(1、8、64、256或1024),fclki/o是MCU时钟。
设M=UR/UC,为调制深度,其一般取值范围为0~1,其中UC为载波幅值,UR为调制波幅值。改变调制波的幅值就能使输出的基波电压幅值发生变化。
根据规则采样法的原理,假设一个周期内有N个矩形波,则第i个矩形波的占空比Di为:

通过设置单片机,利用上述公式计算出占空比使之与计数器的TOP值相乘形成一个正弦表。然后将数据送到比较寄存器中,配置单片机I/O口寄存器,在PD4口输出SPWM信号。整个SPWM产生程序流程图及实时反馈图如图2:
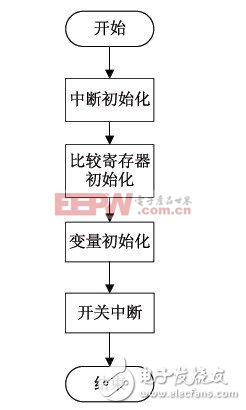
图2 SPWM 产生程序框图
常用的正弦调制法分为同步调制法和异步调制法。同步调制法在调制波的频率很低时,容易产生不易滤掉的谐波,而当调制波频率过高时,开关元件又难以承受;异步调制法的输出波形对称性差,脉冲相位和个数不固定。本软件设计时采用了分段同步调制法,[4-6]吸收上述两种方法的优点,且很好地克服各自的缺点,得到特性较好的正弦波。其具体操作为:把调制波频率分为几个载波比不相同的频段,在各个频段内保持载波比恒定,通过配置单片机内部的载波频率实现输出基波频率的变化,即改变计数器的TOP值,实现调频功能。选取的原则为:
输出频率高的频段采用低载波比,输出频率低的频段采用高载波比。同时,载波比选取为3的倍数以得到严格对称的双极性SPWM信号。本系统中将频段分成五段,具体见表1:
表1 频率分段与载波比取值

对输出电压的实时反馈是软件设计的关键部分。电网的波动或是负载的变化可能导致输出电压不稳定,因此为了实现输出电压的动态稳定特性,在系统中加入PID增量数字闭环控制,公式如下:
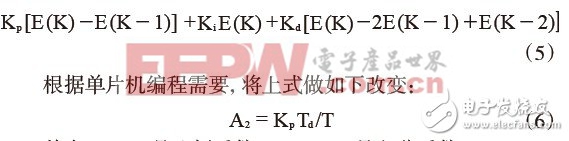
其中Kp=1/σ是比

陀螺仪相关文章:陀螺仪原理










评论