
基于ARM11+CPLD的小型无人机飞行控制器设计
载体坐标系中的矢量
基于姿态数据及各轴角速率,PID控制器的输出由(11)式计算[6][7]:

K为采样序号、
4 系统测试
基于上述设计方案研制的飞行控制器主板如图7所示,安装于测试飞机如图9所示。

本文在某校园区进行多次飞行测试,飞行的航线如图9所示,航线由16个航点构成,航点高度都为300米,航线总长度为8.57公里。无飞机的实际飞行航迹如图9中蓝色线条所示,本次测试从进入航线开始到航线结束共自主飞行了18分钟,姿态稳定,最大偏航距≤15米。

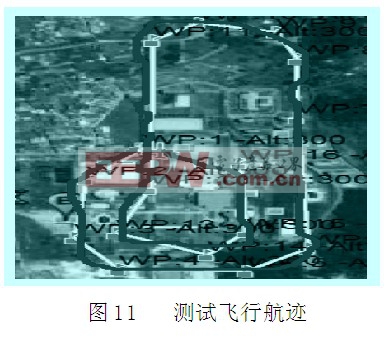
试飞测试的任务载荷为航拍相机,CPLD每4秒输出一拍照脉冲,航拍图片如12所示。

5 结束语
本文阐述基于ARM11+CPLD飞行控制器的构建,ARM11的高速处理能力,使得系统的实时性高,系统飞行更加稳定,且接口丰富,利于功能扩展;CPLD在飞控系统中一方面起到扩充MCU IO口的作用,另一方面提高了系统的实时性。在此飞控主板上,本文实现了导航、姿态、任务等功能模块,飞行测试结果理想。
参考文献:
[1] 徐田来,崔平远,崔祜涛.基于置信度加权的组合导航数据融合算法[J].航空学报,2007,28(6):1389-1394.
[2] Ick-Ho Whang,Won-Sang Ra.Simple Altitude Estimator using Air-Data and GPS Measurements[C].Proceedings of the 17th World Congress of the International Federation of Automatic ControlSeoul,Korea,ION,2008:4060-4065.
[3] 陈龙胜,姜长生.基于干扰观测器的无人机着陆飞行逆控制器设计[J].电光与控制,2009,16(9):52-56.
[4] SAMSUNG Company.S3C6410 HW Design Guide V1.0 [EB/OL].[2011-08-10]. http://www.samsung.com
[5] Analog Devices.ADIS16365 MANUAL [EB/OL]. [2011-08-10].http://www.analog.com
[6] Bryson.A.E.Jr.,Control of Spacecraft and Aircraft[M].Princeton,NJ:Princeton University Press,1994.
[7]ROBERT C.NELSON 顾均晓(译).飞行稳定性和自动控制[M].北京:国防工业出版社,2007.
[8] 韩守谦,裴海龙,王清阳.基于Xenomai的实时嵌入式Linux操作系统的构建[J].计算机工程与设计,2011,(1):96-98
[9] 俞永昌.设备驱动开发技术及应用[M].北京:人民邮电出版社,2010.

pid控制器相关文章:pid控制器原理









评论