
打造最小系统平台
看了前面智能救援车有这么多本领和功能,是不是有点眼花缭乱,不知道该从哪里入手了呢?别急,下面就向大家介绍智能救援车的最小系统,先把这部分制作好,其他的功能就可在此平台基础上逐步增加和扩展了。智能救援车的最小系统包括电源电路、显示电路、微控制器电路、蜂鸣器电路、电压检测电路、减速电机电路等构成。
一、电源电路(见图1)
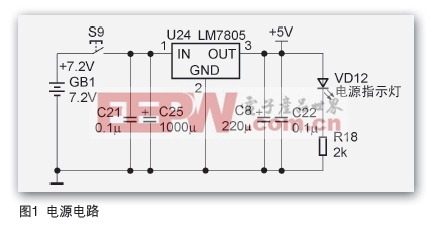
车载电源采用GB1(6节1.2V镍氢电池)提供7.2V电压,经三端稳压器U24(LM7805)稳压、电容滤波后获得5V直流电源,供给后续电路使用。镍氢电池的充电使用专用充电器。
二、显示电路
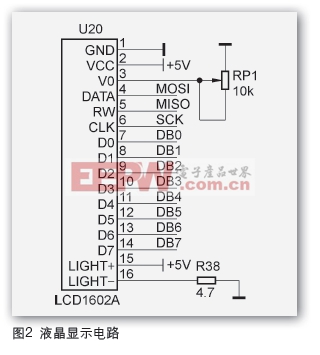
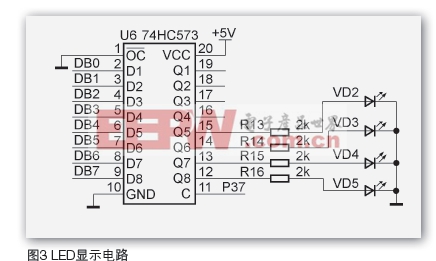
显示电路由两部分组成:1.液晶显示电路(见图2)液晶显示电路由1602液晶显示器U20、电阻R38、电位器RP1组成,用于机器车的状态指示。2.发光二极管指示灯电路(见图3)发光二极管指示灯电路由1个锁存器74HC573驱动4个发光二极管VD2、VD3、VD4、VD5,VD2、VD3用于左转弯提示,VD4、VD5用于右转弯提示。
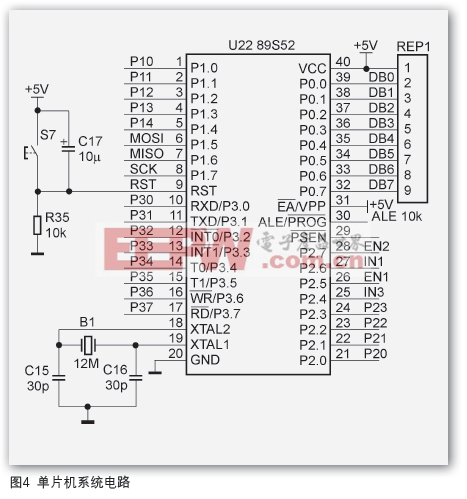
三、单片机系统电路(见图4)
单片机系统电路中采用ATMEL的89S52单片机,复位电路由按键S7、电解电容C17、电阻R35组成,时钟电路由12MHz石英晶体振荡器B1、瓷片电容C15、C16组成,为提高P0口的驱动能力,P0口采用REP1排阻上拉。
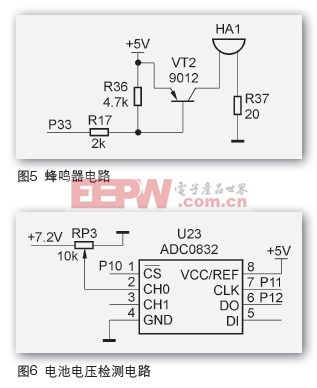
四、蜂鸣器电路(见图5)
蜂鸣器电路原理:蜂鸣器电路由电阻R17、R36、R37、三极管VT2、蜂鸣器HA1组成,由单片机的P3.3口进行控制,当P3.3口为低电平时蜂鸣器鸣响。
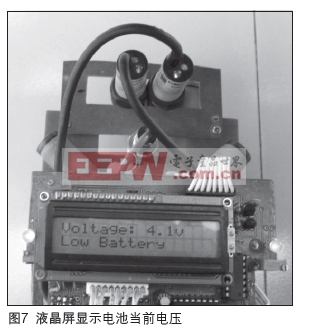
五、电池电压检测电路(见图6)
电池电压检测电路原理:电池电压检测电路由可调电位器RP3、8位AD转换集成电路U23(ADC0832)组成。智能救援车的运行动力来源于电池,电池电压过低会造成整个系统无法运行。因此要实时检测电池电压,当检测到电池电压过低时,单片机就控制报警电路报警提示进行充电。
调试:
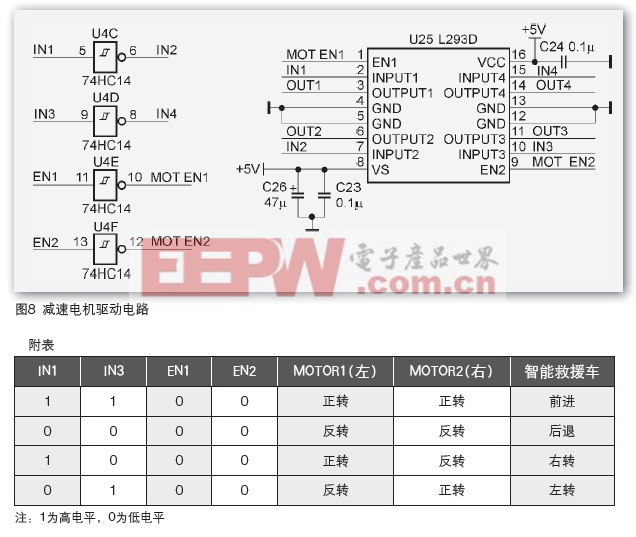
1.电池GB1的额定电压为7.2V,经测试当电池电压£5.76V时,智能救援车无法工作。所以电池电压检测电路的检测电压为5.76V,当电池电压低于5.76V时报警提示进行充电。2.电池电压通过电位器RP3的中间抽头采集。当电池电压7.2V时,调节电位器至正常电压5V;当电池电压5.76V时,RP3的中间抽头测量电压为4V。当单片机检测到£4V电压时,蜂鸣器HA1鸣响、发光二极管VD2、VD3、VD4、VD5全亮,声光报警提示进行充电,液晶屏显示电池当前电压,如图7所示。
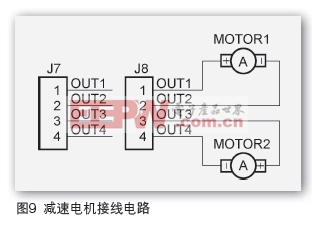
六、减速电机电路(见图8、图9)
常用的电机有伺服电机、调速电机和减速电机几种。伺服电机一般也被称为舵机,主要应用在需要精确控制位置的地方,比如数控机床、遥控模型飞机以及真飞机的舵面控制、船舶舵面控制等等。调速电机一般应用在需要调速度的场合,如空调、光驱、DVD机中的驱动电机多采用调速电机。减速电机由电机和变速箱组成,比用电动机再带一个减速箱体积要小得多,一般应用在不方便使用独立减速箱的环境,如汽车雨刮器的电机就采用的是减速电机。本智能救援车采用减速电机作为动力装置,电机驱动电路采用电机专用驱动芯片U25(L293D)驱动左、右两个直流减速电机,用U4(74HC14)的4个反相器控制L293D的输入及使能信号,使智能救援车左转、右转、前进、后退、停止。
调试:
1.在选用两个减速电机时,应尽可能使两个减速电机的实测参数一致。2.电机控制如附表所示。以上就是智能救援车的最小系统电路,各部分电路的元件参数已在原理图中标注,制作时照参数采购即可

伺服电机相关文章:伺服电机工作原理
蜂鸣器相关文章:蜂鸣器原理











评论