
基于FPGA的磁浮轴承控制系统的设计与研究
0 引言
磁浮轴承(Magnetic Bearing)是以磁性力完全非接触式支持旋转体的轴承,其广义上的定义是可支持直线运动物体的轴承及局部有机械性接触的轴承。其作用原理是借磁场感应产生的磁浮力来抵抗重力场及转轴运动时产生的作用力,将转轴悬浮起来,使得转子与轴承不互相接触。
1 磁轴承控制系统
磁轴承控制系统的研究一直是磁轴承技术研究的热点和难点,磁轴承控制系统一般包括无接触的位移
由于控制算法往往较为复杂,在磁轴承的控制器设计上,一般都采用数字控制方法,即建立基于
2 现场可编程门阵列(FPGA)
FPGA (Field Programmable Gate Atray)是现场可编程门阵列的英文缩写,是可编程专用集成电路(ASIC)的一种(同类的还包括CPLD)。1984年,Xilinx公司首创了现场可编程逻辑阵列(FP-GA)这一创新性技术,并于1985年首次推出了世界上第一块FPGA芯片。在二十多年的发展过程中,FPGA的硬件体系结构和软件开发工具都在不断的完善且日趋成熟。从最初的1200个可用门到90年代时的几十万个可用门,发展到目前的数百万门至上千万门的单片FPGA芯片,Xilinx、Ahera等世界顶级厂商已经将FPGA器件的集成度提高到了一个新的水平。
本文使用的是Spartan-3E Starter Kit Board开发板,芯片采用Xilinx公司的Spartan-3E系列中的XC3S500E芯片。XC3S500E系统门资源包括1164个可配置单元(可换算为4656个片资源)、4个DCM、360K位块存储器、20个乘法器以及232个可以使用的IO端口。设计时可以采用MathWorks公司的Matlab和Xilinx公司的System Generator来负责系统级设计。
Matlab作为线性系统的一种分析和仿真工具,在工程和计算科学上有着广泛的应用。Simulink作为Matlab的一个工具箱(toolbox),在整个的数字信号处理(Digital Signal Processing,DSP)设计中起着举足轻重的作用。它是一个交互式的工具,可用于对复杂的系统进行建模、仿真和分析。System Generator是Xilinx公司的一个模块集(blockset),是simulink的一个插件,其中设置了Xilinx特有的DSP功能的IP核,也包括了基本DSP函数和逻辑算符,如FIR ( Finite Impulse Re-sponse)、FFT(Fast Fourier Transform)、存储器、数学函数、
3 磁浮轴承系统仿真
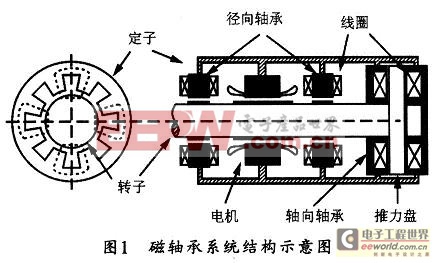
一般的磁轴承系统的结构示意图如图1所示,由图可见,轴向磁浮轴承主要借助轴向电磁铁对转子的电磁吸力来平衡转子自身的重量,同时对转子的轴向运动进行约束。轴向轴承主要承载的是转子本身的自重,属于单方向静态载荷,而其动态载荷相对较小,故可采用单边工作方式的圆盘电磁铁系统。图2为轴向磁铁/推力盘悬浮系统转化的简易结构图。图中,x0为轴向轴承在平衡位置的间隙,i0,ic分别为电磁铁线圈的偏置电流和控制电流,F为电磁铁对转子所产生的电磁力。
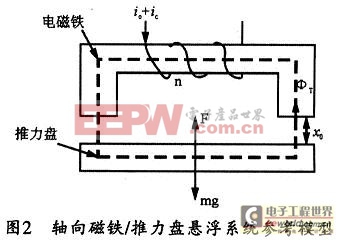
在图2所示的简化模型中,其磁铁和推力盘间总的吸力为:


pid控制器相关文章:pid控制器原理











评论