
步进电机控制器/驱动器简化步进电机系统设计
Run和GoUntil命令用于使电动机保持恒速旋转,直到接到一条制动命令 (适用于Run命令)或者有外部事件发生(适用于GoUntil)为止。当接收到一条制动命令时,控制器执行下面两种操作之一:紧急制动或减速制动。该器件还能执行紧急制动或减速停止,然后提供三态输出。
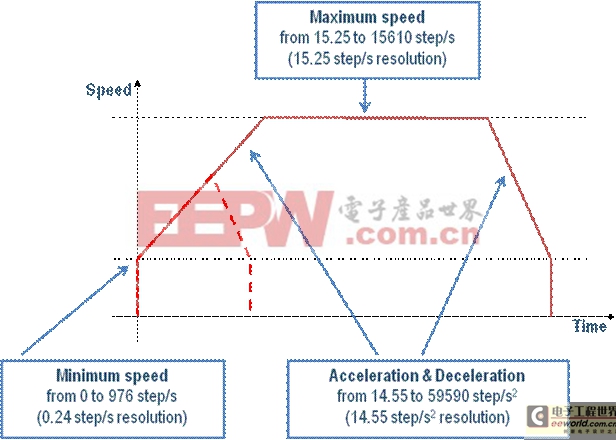
图 2:典型运动曲线
如图3所示,使用一系列Run命令可以执行复杂的运动。每接到一个新的Run命令后,控制器都会驱动电机做加速或减速旋转到新命令指定的位置,并以指定速度保持旋转,直到接收到下一条Run命令或一条Stop命令为止。当接收到一条反向运转命令时,电机减到最低速度,然后再向相反方向加速运转。
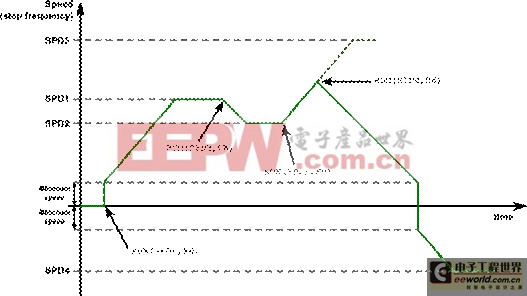
图 3:多条Run命令可实现复杂运动。
电压控制式微步进
通常情况下,步进电机驱动电路是电流式控制设计,电流控制器监测并控制绕组电流强度。这种结构让设计人员能够在宽转速范围内保持所需的转矩,而且电源电压波动很小。这种设计非常适合全步和半步驱动器,而且也易于实现。很多设计人员避免在微步进驱动器中使用电压控制方式,因为电源电压变化导致峰流有很大变化,而且,随着转速提高,电机的反电动势(EMF )也会增强。不过,利用数字控制技术可以修正这些不利因素。
为实现这种电压控制式驱动电路,需要利用一个PWM计数器/定时器电路来控制输出脉宽,以数字方式设置输出占空比。L6470通过在电机绕组上施加电压来控制相电流。虽然不能直接控制相电流的幅度,但是,相电流与相电压的大小、负载、转矩、电机电学特性和转速密切相关。有效输出电压与电机电源电压和KVAL系数的积成正比。KVAL的取值范围是电源电压的0%到100%。在微步进驱动器中,这个最大值再乘以调制指数,可产生所选步数的正弦波。峰值电压由下面的公式得出:
VOUT= VS⋅KVAL
KVAL值由下面的公式得出:
KVAL= (Ipkx R)/Vs
其中:Ipk=所需的峰流
Vs=典型电源电压
R= 电机绕组电阻
该器件的寄存器支持加速度、减速度、恒速运转和保持位置等不同的 KVAL设置,在运动曲线每个部分轻松实现不同的转矩设置。
BEMF补偿
如果在整个转速范围内始终向电机供给相同的峰值电压,随着电机转速增加,电流强度会逐渐降低,因为电机的反电动势BEMF会显著降低施加到线圈上的电压。图4左边的波形描述了没有采用BEMF补偿技术的电机工作状况。从图中不难看出,随着电机转速增加,BEM以线性方式提高,因为线圈上的电压是实际施加的相电压与BEMF电压的差值,所以电流将会降低。














评论