
三轴台式工业机器人通用控制软件设计
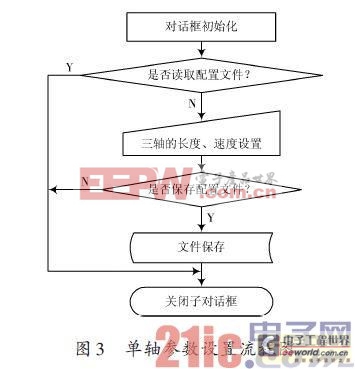
工件参数设置包括工件模型设置、工件上的加工点位置的设置及轴参数设置中的文件读取与保存。其中,模型设置采用多视角视图法,视图个数根据所需加工的模型设定。对于精度要求不高的模型也可采用数组输入的方法。两种方式的模型输入都支持拷贝,便于在已有模型上修改加工位置。而加工点的位置则直接在模型的基础上进行设置即可。
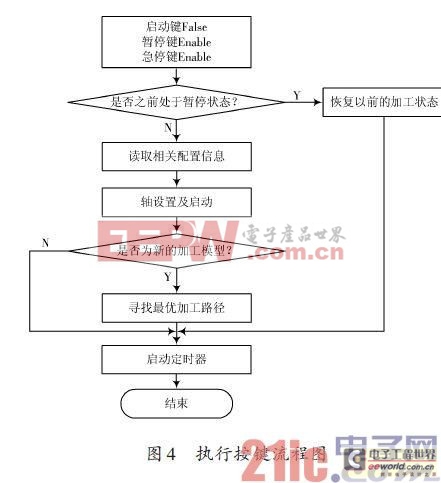
图2的控制界面中存在着3个按键,分别是执行、暂停和停止。这3个按键分别执行着不同功能,一般情况下,只使用暂停按键,停止按键执行急停的任务,用作紧急处理,当停止按键按下时,就意味着加工必须重新开始。执行和停止按键的流程图如图4所示。
4路径规划
4.1环境表示
在环境表示上采用栅格法,用栅格法表示加工工件模型及加工环境相对容易,但时间复杂性相对较高。
对于工业加工而言,加工工件一般都是成批量进行加工的,只需在第一次加工该加工工件开销相对较长的时间,此后的每一次加工只需从存储的文件中,调用之前已得到的最优路径进行加工即可,而且,工业加工更需要一个相对较为容易得到的模型。
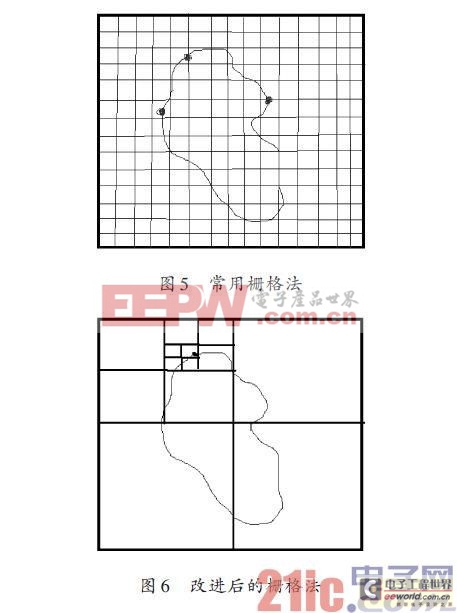
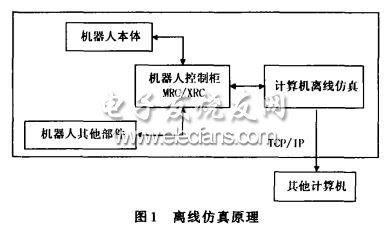
常用的栅格法如图5所示。该方法是将整块目标区域划分成N个等份的小格,但是这种方法对于工业加工来说精度差,数据存储空间过大,而且时间开销较大。改进后的栅格法如图6所示。该改进后的栅格法是采用逐步细分法,先将整个区域细分成四块,然后判断加工点在哪块区域,接着在细分,直到加工点及环境足以被表示出来为止。该方法在对无加工点和无加工工件的区域内不进行细分,大大节省了数据消耗,并且有针对性的对有加工点及加工工件的位置进行细分,提高了加工精度。为了在工件加工时能够更精确地表示加工位置,该控制软件在环境表示上所采用的是改进后的栅格法。









评论