
仿生蜘蛛机器人的设计与实现
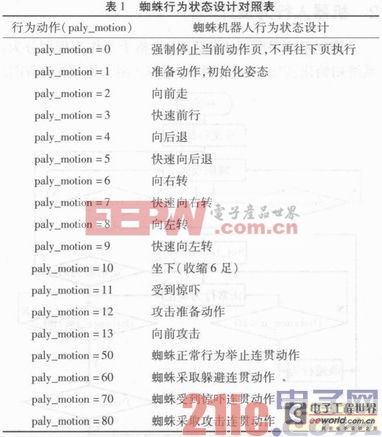
动作初始化部分相对较简单,但要建立在伺服器初始化之后,方能进行。原理上是将每个伺服器旋转角度调整到一定的位置上,使之呈现一个定型姿态,作为机器人的待机动作。通过改变整个系统结构的全局变量play_motion来完成动作初始化,表1对该参数进行了对照解说,再调用Load函数执行该动作页面来实现功能。
2.2 启动模式
2.2.1 睡眠模式
当机器人电源开关开启,进行初始化之后,蜘蛛机器人进入睡眠状态。设计对睡眠模式的定义为:令机器人处于一个静止姿势,不做任何行为,等待被启动。这里设定一个无限循环,当判断收到唤醒命令时,跳出循环,开启定时器,执行正常行为举止后,通过定时器的超时机制,回到睡眠模式。定时器时间值的量化级为:输入的值每0.125 s减1,即当定时器设置为8,便是1 s,具体实现中设置定时器为240,即30 s的正常行为活动后回到睡眠模式。
2.2.2 声音启动
在睡眠状态中,采用两种不同的方式:无线遥控模式和声音启动模式。对于声音启动模式,设定一个阈值,若采集的数据超过阈值时,则开始正常行为活动。阈值的选择根据传感器AX-S1对声音自定义的一个数量级,当周围没有声音输出约为128的数值,声音越大数值越接近255,声音大小每秒输入约为3 800次。当检测到像掌声一样一定大小以上的声音时计一次数,为避免把一次击掌误认为多次,在一次计数后,采用延时方式,约为80μs后继续计数。
2.3 生物行为
正常行为举止:蜘蛛机器人的生物行为即自行通过传感器采集数据,对数据进行判断,然后进行处理的一个仿生过程。设计过程将该生物行为定义为正常行为举止,即正常模式。该模式下,主要研究的是蜘蛛机器人对障碍物的判断,通过AX-S1采集到的distance_u和distance _f两个参数进行分析。当上方障碍物所测距离distance_u≤20时,即认为感应到上方有障碍物,蜘蛛则产生坐下的动作。当前方障碍物所测距离distance_f≤100时,再次检测一下距离是否distance_f≤20,如果20,则退后,向左转,回到正常模式;如果>20,则采取攻击,攻击结束后,回到正常模式。值得注意的是,distance_u与distance_f所采集数据也不是实际的距离,也是通过量化后的数值。
3 结束语
在自然界中,蜘蛛因其独特的爬行机制可以在垂直的墙壁甚至倒立在天花板上行走。运用仿生学原理设计制作的6足蜘蛛仿生机器人系统,可以完成行走、转弯、攻击、趴下等系列动作,并且具有较好的人机交互功能,使蜘蛛机器人达到了仿生的效果,为进一步研究蜘蛛机器人在危险环境中或艰难路况中作业提供了一个基础测试平台和设计方案。

伺服电机相关文章:伺服电机工作原理






评论