
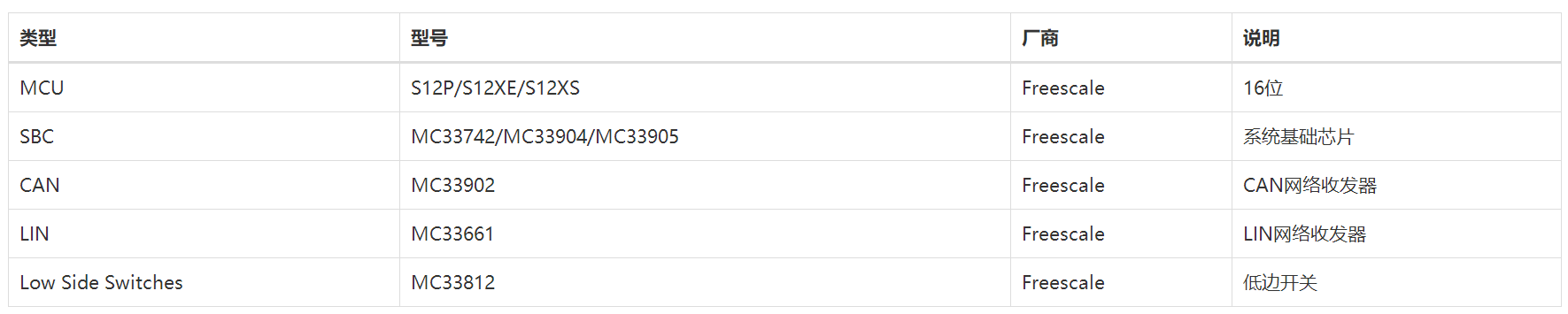
飞思卡尔的车内CAN/LIN网络解决方案
控制器区域网络(CAN)是一种异步的多主(multi-master)串行通信协议,可用来连接汽车和工业应用中的各种电子控制模块。最初,CAN是为需要高级数据集成能力、以及要求数据数率达1Mbit/s以上的汽车应用而设计的。
除了汽车外,CAN网络的应用领域还包括楼宇自动化、环境与照明控制、空调系统、警报系统、自动洒水装置、电梯、自动贩卖机和电机控制系统等。未来,CAN的应用范围还会继续增加。以至于任何一个需要稳定、可靠的低成本网络的系统或设备,都有可能成为CAN节点。迄今为止,全球的CAN节点已达1.5亿个。
CAN应用的挑战
然而,并非所有的CAN网络都是一样的。汽车应用中的CAN网络可根据流量性质的不同,分为两种截然不同的类型。第一种是车身控制网络,它的功能是控制乘客的舒适系统,因此该网络主要处理多种无序或以非规律频率出现的消息标示符(message identifier)。另一种是汽车动力总成网络(power train network),它的功能是传输与引擎和传动控制有关的消息,这些待处理信息的类型相对单一,但出现的频率却非常快,也非常有规律。由于需要处理的信息类型的不同,导致两种网络在硬件和软件系统设计上也大相径庭。
与其它重要的网络协议一样,CAN需要一个物理层器件来执行通信功能。其物理层规范源自ISO/OSI规定的7层模型,负责对总线进行电流和电压控制。物理层器件还需要处理瞬态电流和瞬态电压,以及信令链路上的错误,并尽可能的纠错。
博世(Bosch)公司制订的CAN规范并没有专门的物理层规范。这对设计工程师而言既是福、也是祸。在过去10年里,有2个主要的物理层设计走上前台,并成为绝大多数CAN应用的物理层设计的基础。它们通常被称为高速和低速的物理层,并且都以电压差的方式在一对差分信号线上执行通信功能。当差分信号线中的某一条线出现短路或开路故障时,低速物理层架构就可变成一种单线架构(参考地电平)。由于要执行这项功能,低速架构对于总线速度高于125kbit/s的操作来说,成本过于昂贵。这也是125kbit/s成为划分低速CAN与高速CAN的根本原因。尽管两种架构都是在一对线上使用一个电压参考,但每一种架构的终止方法(termination method)并不一样,产品系统也互不兼容。

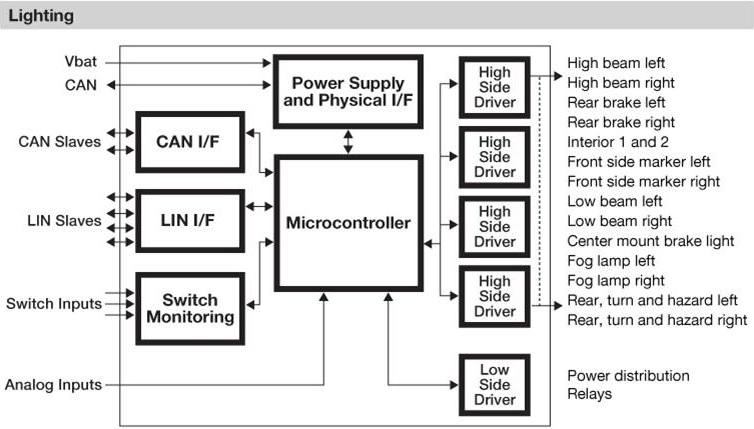
图1:飞思卡尔的CAN应用框图
其实,CAN标准规范中并没有任何对物理层的要求,其它的标准组织也开发出了各种标准来帮助设计工程师开发各种能相互兼容的CAN设备。国际标准组织(ISO)和汽车工程师协会(SAE)分别为欧洲和美国市场制订了各种标准,以确保各种物理层器件与推荐的设计规程之间有互用性。请访问www.iso.org,了解ISO11519-2(低速容错CAN)和ISO11898(高速CAN);或者访问www.sae.org了解SAEJ2411(单线CAN)和SAEJ2284-125/250/500(高速CAN)的标准规范。














评论