
台达A2伺服在包装机打码工艺控制的应用
铝膜小袋包装机往往需要印上生产日期及编号等,在打码控制环节,以往采用PLC脉冲控制步进电机。其精度低、速度慢、控制程序复杂及不好校正误差量等因素,往往造成字码不清晰位置不稳定的情况。采用台达A2伺服PR控制模式下的,内部PR命令、外部事件及E-CAM凸轮综合应用。实现了打码工艺的高速度、高精度、位置可调节的新局面。调整方便、稳定等特性都体现出了A2伺服的出色性能及优异的运动控制综合能力。
1 控制工艺要求及动作说明
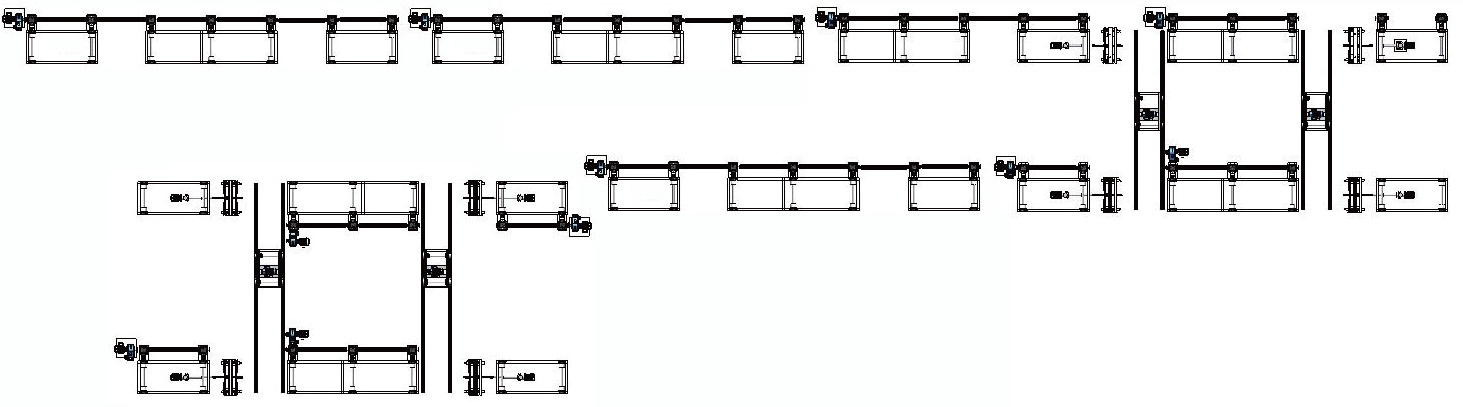
包装机打码工艺的控制示意图如图1所示。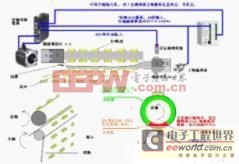
图1 包装机打码工艺的控制示意图
控制工艺要求及动作说明:
1. 伺服通电后,立即以当前点作为零点,然后执行PR1、PR2命令将P5-88、P5-89写入,设定E-CAM凸轮啮合及脱离条件,并启动凸轮;
2. 铝膜由主动轮方向移动的过程,经过主从轮凸轮啮合区,使打码器与铝膜位置速度同步,将字码清晰的印在铝膜表面;
3. 在经过凸轮啮合区后,从轮脱离啮合。,立即执行PR3命令;
4. PR3命令从轴高速向前运动直到检测到定位位置后,启动外部事件;
5. EV1外部事ON信号输入,执行PR51命令定位指令;
6. 等待下进入一次啮合动作。
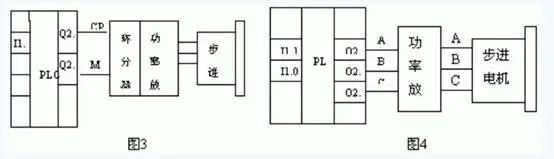
控制模式及I/O规划设定:
将伺服设定为内部PR命令模式,P1-01=1;
任意两输入点P2-10~17规划为电子凸轮啮合控制“36”及事件触发命令1“39”。
E-CAM电子凸轮规划设定:
要想使从轴与主轴同步啮合,伺服电机100000×机械传动比4/3=主轴脉冲14400×2;
凸轮关系为从轴脉冲66666对应主轴一周14400脉冲。
2 PR模式设定
原点设定如图2,PR1设定如图3,PR2设定如图4,事件ON/OFF设定如图5,PR51设定如图6。

伺服电机相关文章:伺服电机工作原理








评论