
任意噪声和约束下的最佳数字滤波器设计
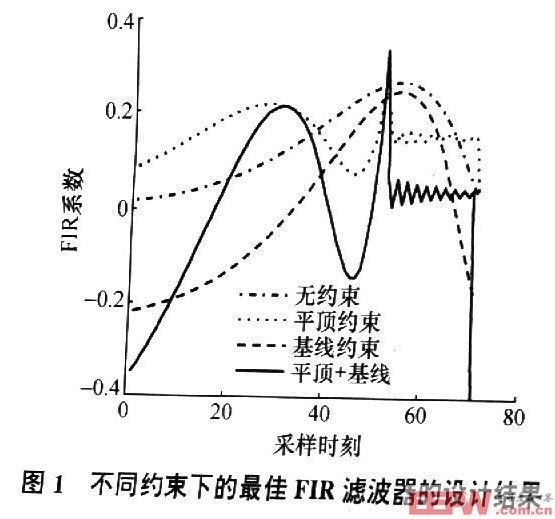
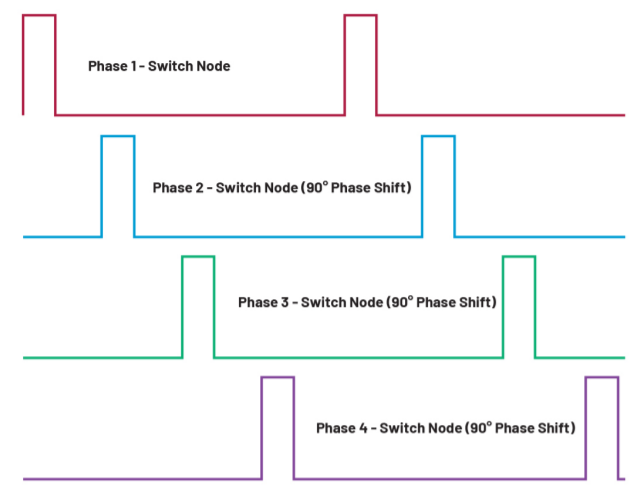
4种不同约束条件下滤波成形后的脉冲波形如图2所示,采用此设计方法成形后的脉冲有很平坦的顶部,可以减小弹道亏损。采用FIR滤波器,成形后的脉冲宽度是滤波器的至少2倍宽,有一定的前后沿,但由于每个输出采样点的数据只是前面一定长度的数据的卷积,输入脉冲的时间间隔如果大于滤波器的宽度,就不会发生峰堆积。
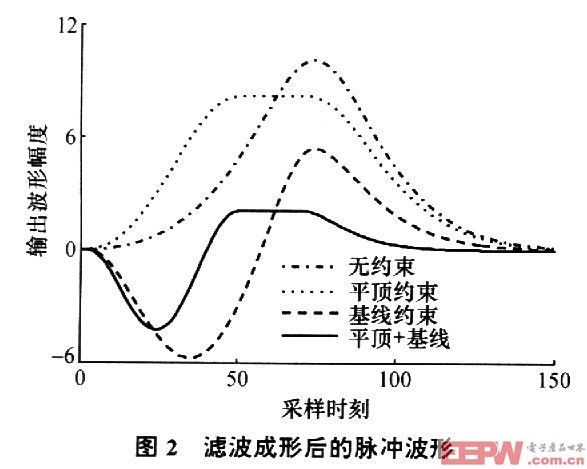
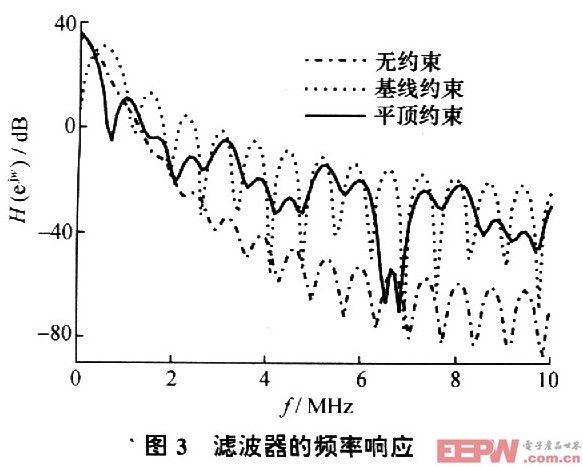
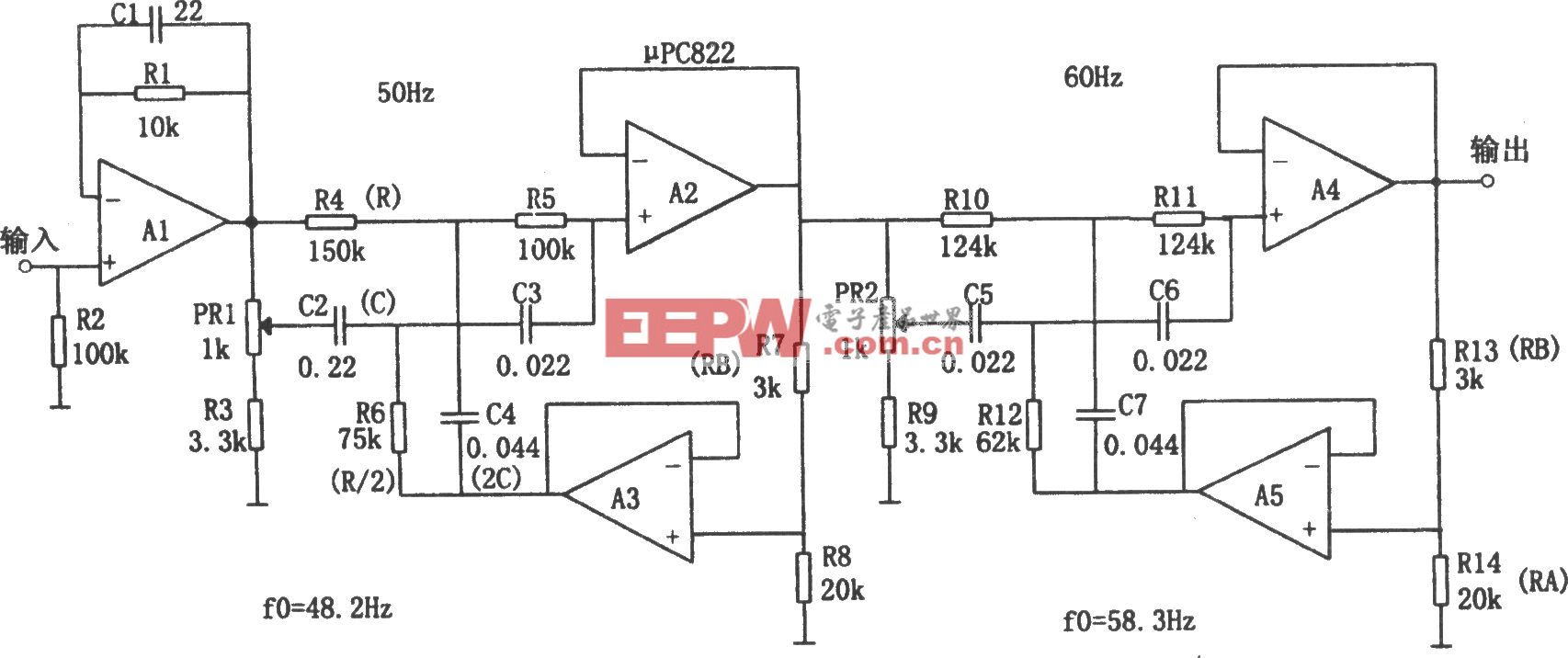
图3为3种约束情况下滤波器的频率响应。附加去除基线约束后,可以看到,在极低频部分有很大的衰减,对直流的抑制达到400 dB,但输入信号的能量很大一部分也在低频部分,成形后的脉冲幅度也降低很多,导致信噪比变小。
3.3 约束对信噪比的影响
约束条件下得到的最大信噪比要小于无约束的情况,图4是不同滤波器长度N在各种约束条件下的信噪比曲线。从频率响应图可以看出,在附加平顶约束后,高频部分的振荡幅度加大,对高频噪声的抑制降低,但在中低频它和无约束频率响应曲线基本一致,信噪比损失比基线约束小。根据是否有基线约束,图4上的SNR曲线分成了明显的两组,附加基线约束后的信噪比要降低很多。无基线约束的条件下,在滤波器长度N=70时,SNR对N的增加已不敏感,N>70的3条曲线几乎重合。
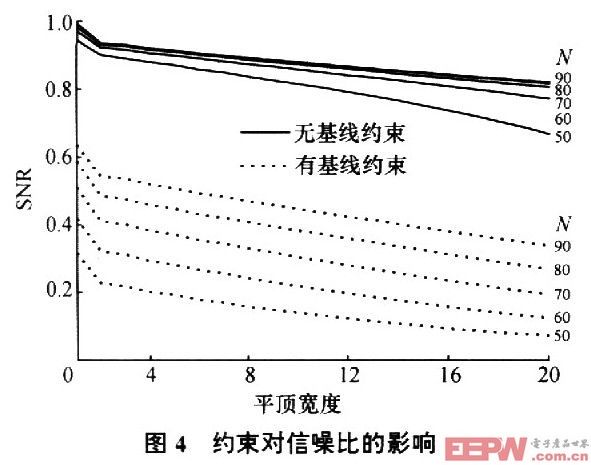
实际应用中,选取的平顶宽度大于电荷收集时间一个采样周期可以避免弹道亏损。是否去除基线可根据系统的需要来选择,在低计数率的条件下,采用单独的基线估计器可能会有更好的信噪比。
4 结 论
本文提出了在约束条件下直接设计最佳数字滤波器的方法。整个求解过程稳定,可在很短的时间内完成,适合实时应用。通过添加不同约束,可以方便地设定成形脉冲平坦顶部宽度;设计出的滤波器可以直接去除基线漂移,适合在系统温度、电路参数变化大的环境中使用。还可通过采样系统噪声估算噪声的自相关函数,综合出最佳滤波器,实现自动配置,减少人工调节,适合在高计数率的高精度谱仪中应用。







评论