
基于DSP的仿人机器人运动控制器系统设计
2.1 主处理器与外围器件单元
DSP主处理器是整个控制器的核心,其运算速度、对信息的处理能力等直接影响控制器的性能。选用TI 公司的TMS320LF2407A 芯片,它是TI 家族C2000系列中的高档产品,集实时处理能力和控制器外设于一身,非常适用于工业控制。其主要特点有:
a.3.3 V电压,功耗极低,且具有3 种低功耗模式。
b.内部采用哈佛结构体系,程序与数据存储器分开,专用的程序总线和数据总线进行访问,取指和执行可同时进行,有效提高了存取速度。
c.流水线指令技术,多条指令可同时进行,平均每条指令大约只需一个指令周期,大大提高了指令执行速度,指令周期可达ns级,在40MHz 主频下每条指令只需25ns。
d.专用硬件乘法器,运算速度大大提高,运算能力明显增强。
e.地址和数据总线都是16位,片内有高达32K的Flash程序存储器,2.5K字的数据/ 程序RAM,544字双端口RAM (DARAM) , 2K字的单端口RAM(SARAM) ,外部存储器可扩展64K字的程序存储器空间、64K字的数据存储器空间和64K字的I/O空间。
f.自带看门狗定时器、串行通信接口(SCI) 模块、16 位串行外设接口( SPI) 模块、SCI/ SPI 引导ROM、16 通道的10 位ADC 转换器、5 个外部中断、基于锁相环(PLL) 的时钟发生器、41个可单独编程或复用的通用输入/ 输出(GPIO) 引脚。
g.2 个事件管理器模块,每个事件管理器包括2个16位通用定时器、8个16位脉宽调制(PWM) 通道、可编程的PWM 死区控制、3个外部事件定时捕获单元、片内光电编码器接口电路。
h.内部带有CAN2.0B 控制器模块。
可以看出,TMS320LF2407A 的功能十分强大,其本身就是一个独立的小型控制系统,再加以适当的外围器件,就可以实现更加复杂的控制功能。尤其是它的两个事件管理器的功能非常强大,完全是为电机控制设计的。
TMS320LF2407A 通过位置传感器实时监控各关节轴系的运行情况,并通过总线与主控计算机交互信息。利用其多个PWM 脉冲通道直接产生控制轴系需要的PWM 脉冲信号;其CAN总线控制器模块可以直接与主控计算机进行通信而不需要增加CAN 总线控制器。
TMS320LF2407A 的软件开发也十分容易,可以反复编程。只要在其专用的集成开发环境CCS(Code Composer Studio) 中编译好程序,用一根下载线通过标准的JTAG接口就可以把程序烧录到DSP的程序存储器中,还可以在线修改和调试。整个过程简单方便,只需一根下载线就可完成,大大简化了软件的开发过程,明显提高了开发效率。同时外部看门狗电路孩可以对控制器电压进行实时监控,当电压出现异常迅速复位主处理器。外部存储器中存放控制算法所需的必要参数,通过SPI 串行外设接口与TMS320LF2407A 相连。
2.2 反馈与执行单元
光电码盘传感器把轴系的位置信息转换成两路宽度相同但相位相差90°的脉冲信号,脉冲的数目与轴系的转角成正比,相位差的符号代表了轴系转动的方向。因此,通过对两路脉冲进行计数就可以得到轴系的实际位置。脉冲信号经过光电隔离器件隔离后送入专用脉冲计数器,计数后的信息送入DSP主处理器。
这里没有使用DSP 进行计数,一是为了节省DSP 的资源,使其可以把更多的时间用于计算和其他控制中去;二是可以提高控制器的灵活性,不用对主处理器进行改动就可以改变控制轴系的数目。脉冲计数器选用流行的CPLD 器件,其强大的功能对提高控制器的性能有很大的帮助,同时还可以作为译码电路的一部分为主处理器提供译码信号。主处理器对接收的轴系位置信息进行计算和分析,结合新的控制命令产生相应的PWM 脉冲控制信号,经过光电隔离和功率放大后送给执行轴系控制轴系的运行。
2.3 通信单元
主处理器通过CAN总线与主控计算机进行通信,接收主控计算机的命令并把底层信息反馈给主控计算机, 实现更高一级的反馈控制。DSP 通过CAN总线接收器连接到总线上,为提高抗干扰能力,中间需要进行光电隔离。整个控制器的结构并不复杂,硬件实现也很简单,但功能十分强大。每个控制器可以同时控制6~12个轴系,可以根据实际情况进行调节。
3 控制流程与分析
整个控制系统的工作过程如图4 所示。
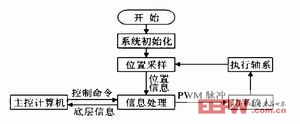
图4 控制系统流程
具体流程为:主控计算机离线规划好数据,系统开始运行并完成初始化工作;主控计算机向底层控制器发送控制命令,同时底层控制器对各执行轴系进行位置采样,并把两者结合在一起进行分析,通过特定的控制算法生成相应的PWM 控制信号,经功率放大后送执行轴系,同时把底层轴系的运行情况上传给主控计算机,主控计算机根据新的情况再产生新的命令发送给各控制器,如此反复。
期间还要不断查询是否有中断产生,如果有中断则转而执行相应的中断服务子程序,主要是用来处理一些异常情况;若有结束命令产生则结束整个运动过程。这事实上是两个闭环反馈过程,底层控制器通过传感器与各关节轴系之间进行小循环反馈,主控计算机通过各控制器与各关节轴系之间进行大回路反馈,这样可以使机器人具有更多的“智能”,更好的进行离线实时控制,这也是机器人朝智能化方向发展的一条重要途径。
4 结 论
文中设计的控制器,采用DSP作为主处理器,较传统的单片机性能有了显著提高,运算速度明显增强,控制能力得到大幅度提升,从根本上解决了使用单片机所带来的各种问题,并为机器人控制系统的发展和提升找到了一个新的方向。同时也希望能对研究机器人的同行们有一定启示,在此基础上研制出性能更高的产品,为推动我国机器人事业的前进做出更大的贡献。












评论