
基于ARM单片机的智能旋转倒立摆系统设计
2)其中要求(2)当摆杆高于水平位置时就不再进行控制,靠惯性就可完成圆周运动。
本文引用地址://m.amcfsurvey.com/article/273185.htm3)要求(3)中实现倒立摆保持倒立状态,再进行直立控制时可通过导电塑料电位器返回的角度值与180°进行比较作比例控制,可以用软件求得角速度来作微分控制。然后利用测速导电塑料电位器测得的旋转臂的转速进行速度的比例和积分控制,从而可以使摆杆在某一点附近完成倒立。
4)完成要求(4)、(5)两项算法与之前相差无几,只是在开始用角度的比例控制使得杆快摆到最高点处的某个位置时转入直立控制即可。
5)完成项目(6)的算法与之前发挥部分的区别在于,在直立控制开始时延时一段时间,待其稳定后,给定一个速度设定值,摆杆即可沿着一个方向做匀速圆周运动。
PID控制器的差分方程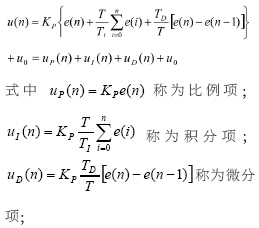
式中 称为比例项;称为积分项; 称为微分项;
系统软件流程图如图6所示。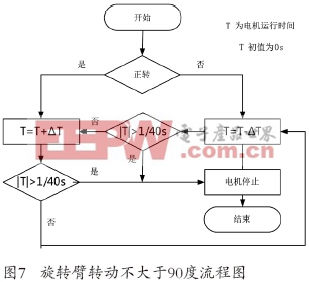
通过不断地调试,测得要求(1)的比例系数Kp=45.0,要求(2)的比例系数Kp=110.0,要求(3)的比例系数Kp=1800.0,积分系数为Kp=450.0。项目(4)、(5)、(6)的比例环节控制摆动的系数Kp=85.0,直立环节系数Kp=2600.0,Kp=250.0。
6 系统测试方法与测试结果
6.1 主要测试仪器(见表1)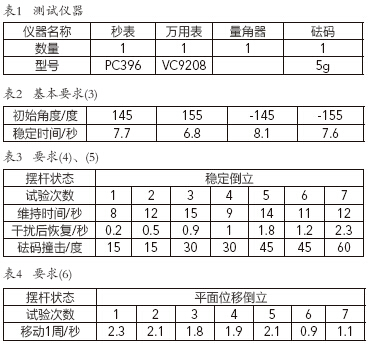
6.2 测试方法与测试结果
要求(1):实验中发现简单设定电机正反转时机,即可实现要求(1)、(2);为满足要求(3)中的旋转臂转动不超过90度的限制条件,所设计的程序对应流程图如图6所示。此时做出来的实验数据才有意义。实验结果见表1。
要求(4)、(5)、(6):从摆杆保持倒立状态时开始计时,实验结果见表3、表4。

pid控制相关文章:pid控制原理
pwm相关文章:pwm是什么
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
低通滤波器相关文章:低通滤波器原理
加速度计相关文章:加速度计原理










评论