
最完整的磁阻角度和线性位置测量系统解决方案
传感器基础知识
本文引用地址://m.amcfsurvey.com/article/278835.htm标准AMR传感器由两个惠斯登电桥组成,互相之间的相对角度为45°,如图7所示。
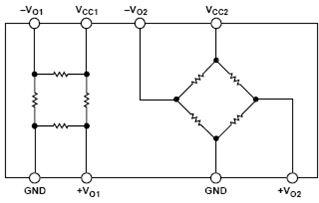
图7.ADA4571双惠斯登电桥配置
旋转磁场产生正弦和余弦输出信号,如图8所示。两个信号在180°范围内均为周期信号,因此没有额外元件或参考点就无法进行全方位360°测量检测。
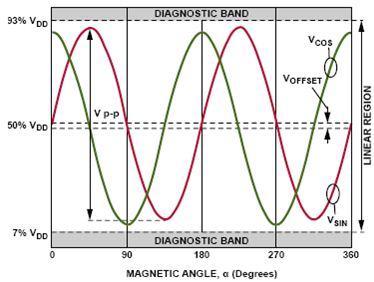
图8.磁阻传感器输出电压
通道灵敏度
ADA4571传感器标称灵敏度为每通道52 mV/°,这意味着磁化矢量和传感器方向之间的每一度变化都会产生52 mV的输出电压改变。角度的灵敏度并非常量。灵敏度下降的部分是线路斜率接近零时的输出部分。
如图8所示,余弦输出(绿线)在磁化矢量角度接近0°、90°、180°或270°时损失灵敏度。类似地,正弦输出(红线)在磁化矢量角度接近45°、135°、225°和315°时损失灵敏度。幸运的是,当一个通道的灵敏度降低时,另一个通道处于高灵敏度区域。
系统带宽、磁场旋转
磁场角度矢量是理解电路带宽的重要内容。ADC每微秒转换一个样本。为了获得1°分辨率,磁场1 ms只能移动1°(2.778 kHz),否则ADC无法以足够高的速度进行采样,以便跟上磁场变化的速度。对于1 MSPS ADC,这表示磁场的最大可用角速度为2.778 kHz.
旋转测量测试结果
将直径方向的N42磁体(直径= 0.5英寸,厚度= 0.125英寸)连接至金属杆的末端。精密直流电机可对金属杆进行精细角度控制。传感器精确安装在磁体正面。气隙设为2 mm.只要磁铁激励使传感器完全饱和,则结果便与气隙基本无关。
电机转动,创造出与传感器相交的旋转磁场,进而产生重复性正弦和余弦输出电压,适合进行角度计算和数据采集。
图9显示了该设置的功能框图。图10是该设置的照片,可用来采集轴尾配置的数据。该设置由无刷直流电机、物理安装、磁体和集成相应ADA4571传感器的PCB组成。
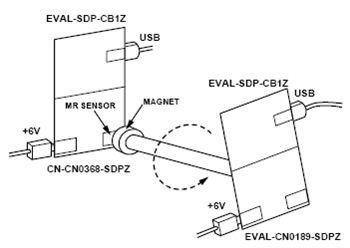
图9.数据采集测试设置——轴尾配置

图10.无刷直流电机基准测试设置照片
图11通过磁体的多次转动,将电机的机械角与传感器的计算磁场角相比较。该计算利用两个输出之比的反正切函数。未进行校准时,误差接近±1°。
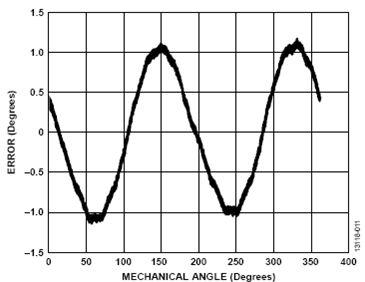
图11.失调校正前的角误差与机械角之间的关系
矢量控制相关文章:矢量控制原理











评论