
基于嵌入式的悬架与转向集成控制器研究
在输入信号进入MCU之前,需要进行模数转换、电平匹配等信号调理。转向盘信号由转矩传感器提供,转矩传感器由滑块、钢球、环和电位器组成,用来获得转向盘操作力大小和方向信号,转换为电压值传递到MCU的AIN0和AIN1脚。MCU接收到主、副两路对称信号,采样时只需采用一 种电路。输入信号幅值为 0~5V,S3C44B0X的A/D转换器输入电压范围为0~2.5V,故需进行滤波和分压处理,如图4所示。采样滤波为二阶低通有源电路,阻值相同的 R1、R2先将输入信号分压,幅值变为原来的一半,然后与C1构成一阶低通滤波电路,R3与C2构成二级一阶低通滤波,运放起电压跟随作用。
本文引用地址://m.amcfsurvey.com/article/83739.htm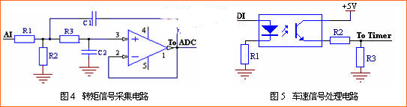
加速度传感器根据压电效应原理,加速度导致晶体变形,产生电荷改变,经电荷放大器放大滤波后经过通过二阶低通有源滤波电路,同图4,再进入模数转换ADC端口。MCU根据车身垂直振动加速度和车轮振动加速度的差值及其变化率进行进一步计算。
车速传感器位于变速箱上,根据车速大小产生成比例的信号,从车速里程表引出,为单极性脉冲信号,电压在9.5V以上,ARM能处理的信号电压为2.5V,所以车速信号的调理主要是信号的电平匹配,设计中采用光电耦合,见图5所示。车速信号DI经光耦转变为5V的脉冲信号,经同阻值电阻R2、R3分压后输到ARM的计数器,经程序计算得到相应车速。
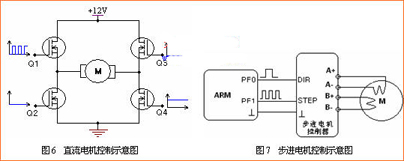
对执行机构的输出控制包括对EPS直流电机和减振器步进电机的控制。直流电机控制可分为励磁控制和电枢控制两种方法。这里采用开关控制方式驱动功率场效应晶体管,通过脉冲宽度调制PWM控制电枢电压实现转速控制。图6所示为直流电机控制示意图[7],定义ARM的端口PE3、PE4、PE5、PE6输出直流电机控制信号,经过四个驱动光耦分别加到四个MOS开关管Q1、Q2、Q3、Q4控制端。当要求电机正转时,Q1受PWM 信号控制,同时Q4被施加高电平导通,Q2、Q3被施加低电平截止;当要求电机反转时,Q3受PWM信号控制,Q2被导通,Q1、Q4被截止,方便实现了电机的方向控制和转速控制。
3. 软件设计
硬件功能的实现需要软件的支持,这里用的软件集成开发环境是ADS1.2(ARM Developer Suite),它是由ARM 公司提供的专门用于 ARM 相关应用开发和调试的综合性软件,用户可用它的CodeWarrior IDE来开发、编译、调试采用包括C、C++和 ARM 汇编语言编写的程序。集成控制软件流程见图8所示,程序开始初始化后进入循环,等待中断,响应后进入中断子程序返回采集信号,ARM对其进行PID控制和模糊处理,输出控制信号到执行机构,同时返回输出信号进行反馈对比。程序中两个关键是PID算法和模糊算法的实现。
为便于在计算机中实现PID控制,当采样信号足够小时,用求和代替积分,用向后差分代替微分,将PID控制方程:![]() (1)
(1)
离散化为差分方程得到数字PID控制方程:![]() (2)
(2)
式中,Kp,Ki,Kd分别是比例系数、积分系数和微分系数,由仿真整定出这三个参数。
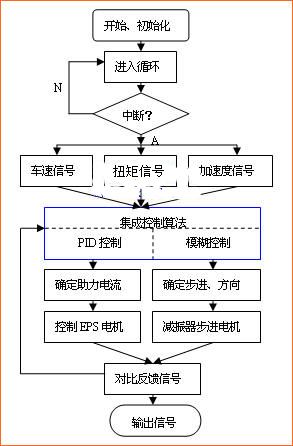
图8 软件流程示意图
在模糊控制子程序中,首先定义模糊控制规则表,再对车身和车轮加速度差值及其变化率进行模糊化,限定论域的饱和值后进行模糊推理,最后反模糊化得到步进电机的方向和脉冲数,进而控制电机的转向和步距角。这里为了易于编程实现,模糊化采用的是三角隶属函数,模糊规则使用最常用的if-then规则,反模糊化采用重心法。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
pid控制器相关文章:pid控制器原理




评论