
一种基于DSP平台的快速H.264编码算法的设计
2.2编码器编码流程
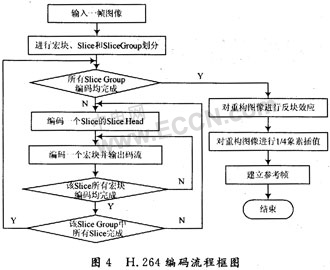
本文引用地址://m.amcfsurvey.com/article/84083.htm如图4所示为H.264编码器主流程。对输入的一帧图像首先进行单元划分:以宏块为基本单元进行划分,再由若干宏块在组合成Slice,由Slice再组合成Slice Group,这样每个宏块所属的Slice和Slice Group也就确定了。再判断输入的一帧图像是I-Frame还是P-Frame。在以上工作完成后,也就可以对每个宏块进行编码了。在对每个宏块都编码完成后,还需要对重构图像进行1/4象素精度插值处理、参考帧缓冲区插入处理等工作。至此,编码一帧的工作才算完成。
3 运动估计模式快速率失真决策
为了减少图像序列的时间冗余,达到更好压缩效果的目的,H.264/AVC编码方案采用运动补偿技术和预测。即由先前已编码的一个或多个帧产生当前编码帧的一种预测模式,然后再进行预测编码。且采用了一种可变块尺寸的运动预测模式,亮度块尺寸的范围从16×16变化到4×4,其中包含很多可选模式,形成了一种树形结构的运动预测。对于I帧(包含帧内4×4、帧内16×16),对P帧(包含帧内4×4、帧内16×16、SKIP模式、帧间16×16、帧间16×8、帧间8×16、帧间8×8、帧间8×4、帧间4×8)同时还为P帧和B帧提供了特殊的SKIP模式,总共11种模式。这些可选模式的存在使得编码方式更加灵活,编码精度相对于固定尺寸块预测要高很多。然而,可选的帧问预测模式增加了,必然会使得运算复杂度增加,因此有必要采用一种高效的决策方法来选取块尺寸组合方式,使得编码效率和编码质量均佳。
3.1 拉各朗日代价函数
引入拉各朗日代价函数如下:
![]()
其中D表示重构恢复图像相对于原始图像间的失真;R(si,m)表示对宏块编码后数据及相关参数在码流中所占用的比特数,一般由编码统计得到,但对于SKIP模式,比特数默认为1比特;λ表示模式选择时所使用的拉各朗日乘积因子。
对于运动估计,可使用拉各朗日代价函数作为选择运动矢量的判决标准。根据式(1)得到对一个采样块si进行ME判决的代价函数为下:
![]()
该式返回产生最小代价值的最佳匹配运动矢量mi,其中M指各种可能编码模式的集合,m为当前选定模式,式(2)中R(si,m)是运动矢量(mx,my)所要传输(按熵编码)的比特数。D(si,m)表示对图像宏块的预测误差,对于该预测误差的计算有两种方案:当预测误差选择是绝对误差时用(SAD)表示,如式(3);当预测误差选择是平方差时,则用SSD表示,如式(4)中:
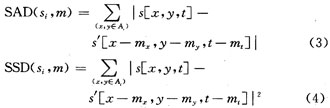
其中A为当前编码宏块。在使用多参考帧进行运动估计时,mi表示所选用的最佳参考帧。在进行运动搜索时,对块si先是进行整象素精度的运动搜索,以取式(1)最小值为匹配标准,得到整象素精度最佳匹配点后,以同样的方法进行1/2,1/4象素精度的匹配搜索。同时在多个参考帧内作同样的操作,将所得的函数代价进行比较得到最小值,也就找到了s,块的最佳匹配的运动矢量mi。
3.2 快速预测模式判断算法
快速算法相对于拉各朗日代价函数算法,可分以下两步实现:
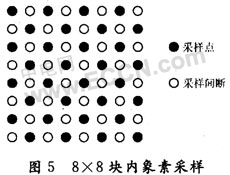
(1)以基于预测模式的方式计算代价函数J,但是这里采用简化的计算方法,对每一种采样模式进行分行交错隔点采样,如对8×8块内象素进行下采样,采样如图5所示。
然后对采样点计算SAD,记做SADi。仅对采样点计算的拉各朗日代价函数如下:
J=[SAD(si,m)+λ?R(si,m)]
先对上述各种模式分别计算代价函数J,然后选择代价最小的3种模式构成候选模式集。
(2)对步骤(1)所得到的候选模式集中每个模式,按照式(1),通过计算基于率失真的代价来实现基于RDO的模式选择,也即C值最小的模式作为最终预测模式。
4 测试结果与结论
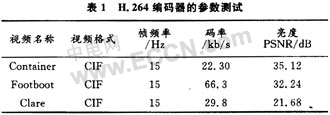
目前,基于DM6446平台上设计的以上H.264编码器系统己基本完成,我们选择了几个常见的视频对该编码器进行了性能测试,测试数据如表1所示。数据表明本H.264编码器能够正常工作,且表现出较好的压缩性能。当然该编码器只实现了H.264协议的基本档次的部分,而且尚未进行更专门的优化过程,而协议的其他部分,由于其复杂性,则需要进行进一步研究,沿着这个方向,视频还可以进一步压缩。









评论