

基于TLE7810的车门控制系统设计

基于TLE7810的车门控制系统设计
汽车技术发展至今,电子控制单元(ECU)已经应用到在汽车内部的各个环节,技术也日趋成熟。作为车身电子的重要组成部分,车门电子自动控制技术的发展也十分迅速。但在实际应用中,凡是电动车窗或车门设备都有潜在的卡死可能,由此便可引发伤人的危险。因此,在门控系统中,车窗防夹设计占有极其重要的位置。
大多数已有的具有防夹功能的电动车门控制产品有一个共性,就是在硬件设计中以MCU为核心,辅之以功率器件、控制电路和相关的通信模块(CAN或LIN),由这些组件配合共同实现驱动电机、升降车窗、故障识别与诊断等一系列控制功能。但是,这样的设计往往会遭遇一些技术瓶颈,比如在原理图设计中,MCU外围电路的搭建,功率器件的选取,电子元件之间的配合与连线;在PCB板设计中则要考虑众多器件的布置和安放,烦琐复杂的走线,以及由此而引发的较差的EMC。这些虽然对系统的总体功能不会产生很大的影响,但会使电路可靠性不高,严重者更是故障频频;除此以外,大量的电子器件还无形中增加了产品的重量和成本。
针对这方面问题,我们提出了电动车窗设计的另一种解决方案——以英飞凌公司推出的TLE7810芯片为核心,外围辅之以简单功能模块,优化设计的同时也探究了TLE7810功率芯片在电机控制中的作用。
总体设计与方法求解
1 TLE7810芯片特性及其优点
由于此车门控制系统针对非司机侧电动车窗设计,因此与司机侧电动车窗相比,生产成本尽可能低;而且,非司机侧门控系统不要求对后视镜方向调节、刮雨器、外部车灯进行控制,功能大大简化。因此,选用TLE7810便可满足所有要求。
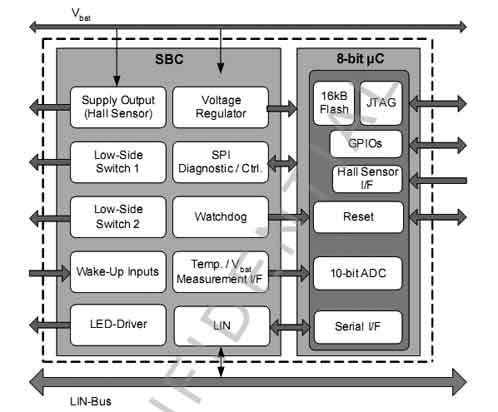
图1 TLE7810内部结构
图1是它的结构模块。可以看出,对非司机侧车窗的电子控制,TLE7810不仅能够满足各项指标和要求。而且,“一芯两核”的特点简化了原理图设计和PCB的走线,同时还可降低成本。
2 车窗电机驱动控制设计
基于TLE7810自身特点,设计的总体框图如图2所示。

图2 硬件结构框图
12V的VBAT电压同时接TLE7810和执行电机以供电,TLE7810中的8位单片机通过LIN总线与主控制器(司机侧)通信,它的两个低边开关与Relay连接以控制开关的接通与关断,进而驱动H桥控制电机。霍尔传感器TLE4966采集电机工作信息作为反馈送回MCU。反馈的内容包括电机位置和转动方向两个信息,以便更加精准地记录的电机工作情况,进而对车窗升降和电机的堵转进行控制和识别,提高工作性能。此外,PWM调压方式作为可选配置也列入设计范围。

图3 TLE7810引脚连接方式

图4 TLE4966霍尔传感器外围电路与接法

图5 ULINK关引脚输入

图6 Relay控制
图3所示为TLE7810的引脚连接方式。
TLE7810的输入大体可分为三部分。第一部分为MON1-MON4的按钮采样输入,按钮安装在车门内侧,当乘客对其进行操作时,发出的控制信号通过这四个口送至MCU从而唤醒单片机。第二部分为P2.0、P0.3和SUPPLY对应的SPEED、DIR和SUPPLY霍尔信号输入,这部分功能是接受霍尔传感器TLE4966(见图4)实时反馈回来的电机工作状态信息。通过这几个引脚,MCU能够及时识别电机工作情况,并据此发出控制指令驱动或停止电机运行,从而应对电机工作的各种突发状况,因此这部分输入非常重要。第三部分是ULINK相关引脚输入,这部分与JTAG连接(见图5),用于程序下载。
TLE7810的输出引脚主要输出开关信号,控制Relay(见图6)进而驱动电机。这部分引脚主要是用以驱动高边LED的MON5高边开关,两个低边开关LS1和LS2连接Relay,用以驱动H桥控制电机转向。
还有一些引脚,如LIN用来与上位机进行通信,PWM用来起动电机,RESET、VBAT、VS等构成TLE7810的最小系统。

图7 防夹程序流图
电机控制程序流程如图7所示,当采样到按钮信号或由上位机通过LIN发过来的控制指令时,MCU被唤醒,调入电机控制程序。电机控制车窗运行有两种模式——上升或下降。在每一种模式执行过程中,如果采集到由按钮发出的执行反方向运行信号时,程序控制电机立即切换到另一种运行模式。在上升模式中,有两种情况使得电机发生堵转,即玻璃上升置顶和上升过程中遭遇防夹力,这两种情况的区别判断主要是电机驱动车窗上边缘至窗顶距离d是否位于4mm处。当d≥4mm时,程序调用防夹函数,否则停止电机运转。在下降模式中,阻力主要来自车窗运行至底部的阻挡力,所以直接停止电机即可。
车窗防夹验证与结果
按照现行惯例,本项目实验为电机配备了双霍尔传感器来感应电机是否受到了阻力。并且为了完善实验条件提高实验精度,实验中使用了力传感器来设置和测定防夹力的大小。它的好处是通过与防夹力标准的对比,确保每个位置的防夹力在不同电压下都小于100N(汽车厂的标准)。

图8 车窗防夹实验测得的力和电流曲线
实验步骤总体上可分为三步:一、按动按钮使电机驱动车窗玻璃举升;二、在车窗玻璃上升过程中为其施加一个反方向力模拟防夹力;三、观察玻璃运动情况,即电机工作情况,记录相关波形。

图9 电流与霍尔关系波形
整个过程中所记录的防夹力与电机电流波形如图8所示。黄线是车窗玻璃的受力情况,红线为电机电流变化曲线。车窗玻璃在上升过程中,电机电流为正,定义为正转(图中所示电流零点偏置9.9A),即车窗玻璃上升方向。在电机举升车窗过程中施加防夹力,黄线迅速向上爬升100mV。这里需要说明的是,按照传感器给出的比例关系:
防夹力(N):电压(mV)=0.3
本实验中黄线的100mV应对应30N的防夹力,ECU成功地识别出这个障碍并做出反应,由程序控制电机停转200ms,在此期间电流为零,防夹力依然作用于车窗玻璃。200ms后,程序控制电机反方向旋转驱动车窗玻璃向下运动,电流为负,待下降200mm后电机停止旋转,电流为零,整个实验过程结束。图9是突然对车窗玻璃施加防夹力这一瞬间电流和霍尔传感器信号之间的变化关系。从图中波形可以清楚的看出,在电流爬升过程中,由于电机转速下降,霍尔采集的信号周期增加,电机停转后,电流陡降,霍尔周期随之变为无穷大。
结语
通过一系列试验可以得出,在正常情况下,TLE7810的防夹力基本可以做到20N,这样就可以有80N富裕(100~20N)来应对车窗变形、或者其他不可预测障碍造成的力。防夹力度可预先设定及调整,可适应随环境因素而改变的车窗阻力以稳定防夹功能,自动校正车窗末端以确保车窗准确地开关,电机超载电流保护,渐进式电机启动及停止操控,低耗电模式、兼备手动及自动车窗控制模式,整合式设计便于安装及降低成本,备有完善断电及故障保护。



评论