
RSSI 室内节点定位系统设计

汇聚节点设计
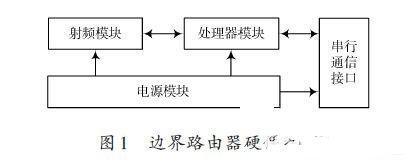
本文引用地址://m.amcfsurvey.com/article/145478.htm汇聚节点包括控制器模块、射频模块、通信模块、电源模块等部分组成,其主要功能是通过射频模块收集信标节点的测量信息,计算目标节点与各个信标节点的距离,并通过串口将各个信标节点编号和距离传给位置计算装置。在较大规模的网络部署中,也可通过ZigBee网络将距离数据传给远端的位置计算装置。汇聚节点控制器同样采用CC2430芯片,汇聚节点的系统组如图5所示。
串口通信模块采用了控制器的USART片内外设,可输出TTL的串口通信数据。由于位置计算装置多采用PC机,最新生产的PC机一般都取消了RS232通信接口,采用更为方便的USB接口,故在汇聚节点中采用了Philips公司的PL2303数据转换芯片[7],可将TTL的串口数据转换成USB通信数据,方便与电脑连接。PL2303的转换电路如图6所示。

一般PC机的USB接口可提供5V的直流电源,最大电流可达500mA,足以满足汇聚节点的电源需求。汇聚节点通过USB接口从位置计算装置获得5V电源,输入的5V电源首先通过电容滤波,再通过稳压芯片输出给处理器稳定的3.3V工作电压,在该节点中,选用专为通信控制芯片提供转换电压的LM1117为转换芯片,它具有功耗低,体积小等优点。又因为电压中含有许多高频干扰源,这些高频成分很容易经过电源进入通信系统中。另外系统自身的发送频率也会经过电源感应反馈到通信系统造成干扰。因而可在电源电路中加入220μH的电感,与并入多个不同容值的电容所构成的滤波电路来抑制各种高频信号。使节点能够得到稳定可靠且低干扰的电源,保证其可靠运行。具体电源电路如图7所示。

系统软件设计
定位系统需要目标节点、信标节点、汇聚节点、位置计算装置协调工作完成定位功能,其中的目标节点具有两种工作模式,连续模式和命令模式。在命令模式下,当目标节点接收到机器人发出的定位命令后,进行RSSI测距;在连续模式下,目标节点连续发送射频信号进行RSSI测距。两者主要工作步骤相似,下面仅对目标节点基于命令模式定位方法的工作步骤进行描述。其中测距公式采用式(1)计算。![]()
式中,![]() 为接收到信号强度,模型参数A、n是根据实际环境测的数据得到的。
为接收到信号强度,模型参数A、n是根据实际环境测的数据得到的。![]()
通过公式(2)计算出目标节点与各个信标节点的距离d(m),其中的μ为修正系数可通过信标节点的位置可知。
具体工作步骤如下:
(1)信标节点启动,首先初始化,然后立即进入实时监测射频同步信号状态。
(2)目标节点通过串口通信模块接收到移动机器人的定位请求后,立即发送射频信号,其中的射频信号携带目标节点的ID信息。








评论