
基于多传感器信息融合的球磨机负荷检测系统

信号处理一般包括信号的预处理、A/D转换和数字信号处理器的数字信号处理等。其中,对于要检测的声响和振动信号,是随机的混有多种噪声信号在内的复杂的时域信号。然而球磨机不同负荷参数的变化往往引起声响和振动信号频率结构的变化,为了通过所检测的信号得到球磨机内部负荷参数,往往需要了解信号的频域信息。所以,需用快速傅立叶变换(FFT) 对声响和振动信号进行频谱分析,计算其反映球磨机内部负荷参数的状态和特征信息。

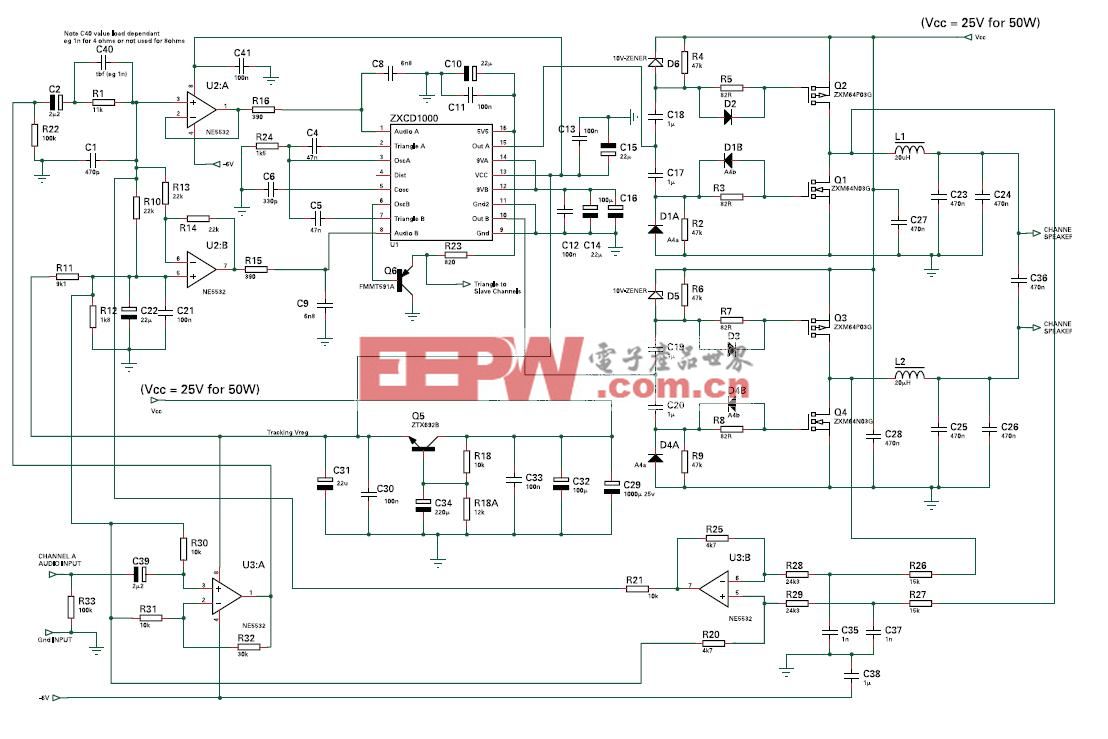
图2 振动信号采集电路
(3)数据层融合
由于磨矿过程机理复杂、影响因素多,又是一个多变量输入输出过程,生产过程缓慢,滞后时间长,同时具有非线性、时变性以及干扰因素多而严重等特点。此外,球磨机机组庞大,噪声高达100dB。在这种相当恶劣的工作环境下,如果用传统的单一传感器来观测球磨机的外部响应信息,显然是难以胜任的。所以,基于信息融合的多传感器观测手段在这里是个很好的应用方案。分别通过声音传感器、振动加速度传感器和有功功率传感器进行球磨机外部响应信号的数据采集,经信号处理后提取的这三个参数在数据层融合,可以增强获取的球磨机外部响应信息的冗余性和互补性,减少整个系统的不确定性;当某个传感器失效时,多个传感器提供的冗余信息则可以排除故障信息,从而提高系统的鲁棒性。
因为融合是在信息的最低层次进行的,传感器原始信息的不确定性、不完全性和不稳定性,以及数据通信量较大,抗干扰能力较差等,决定了融合时算法需有较高的纠错能力,实时处理大量数据的能力等。神经网络作为一种并行的分布式信息处理系统,具有很强的信息综合能力,知识泛化能力及结构的容错性等,可以在数据层用作融合算法。
(4)融合算法设计
本文是要通过检测球磨机的外部响应来间接地检测球磨机的内部负荷参数,即球磨机外部响应是已知的,球磨机内部参数是待预测的。因此,可以在数据层,通过神经网络建立球磨机系统的逆向模型——球磨机外部响应与内部负荷参数之间的关系模型,从而进行球磨机负荷的预测。
本文神经网络选用有教师学习的标准三层结构的径向基函数RBF网络,输入变量是数据层的球磨机外部响应,输出变量是球磨机的内部负荷参数。
① 输入层的设计
由于RBF神经网络模型的输入变量是球磨机的外部响应信号,根据三因素检测的要求,本文检测了球磨机的外部声响信号、外部振动信号和有用功率信号这三个因素,所以输入层节点有三个,分别是归一化处理后的球磨机的外部声响信号、外部振动信号和有用功率信号。
② 输出层的设计
RBF神经网络模型的输出变量是球磨机的内部负荷参数,由于本文要检测的球磨机内部负荷参数包括球磨机的介质充填率、料球比和磨矿浓度,所以,以介质充填率、料球比和磨矿浓度作为输出变量建立神经网络系统。这样,输出层有三个节点,输出层的激活函数是简单的求和运算,即输出层是隐层输出的加权和。
③ 隐层的设计
在RBF网络训练中,隐含层神经元数量的确定是一个关键问题,MATLAB7提出了改进方法,基本原理是从0个神经元开始训练,通过检查输出误差使网络自动增加神经元。每次循环使用,使网络产生的最大误差所对应的输入向量作为权值向量,产生一个新的隐含层,然后检查新网络的误差,重复此过程直到达到误差要求或最大隐含层神经元数为止。实现是:函数newrbe在创建RBF网络时,自动选择隐含层的数目,使得误差为0,完成网络的训练和建立(RBF神经网络的建立过程就是训练过程)。
RBF神经网络输出层三个神经元上的数据经过反归一化处理后,就为球磨机的内部负荷参数:介质充填率、料球比和磨矿浓度。
在磨矿过程自动控制中,可以根据这三个参数间接反映的球磨机的负荷(包括球负荷、物料负荷以及水量的各自数值)实现整个球磨机的优化控制。












评论