
基于FPGA的GPS+GSM双重车载定位系统设计

3 利用NiosⅡIDE进行系统软件设计
3.1 软件总体构成
定位系统软件主要完成定位信息的采集和定位终端与监控中心之间的数据通信,主要由主程序、显示程序、GPS信息处理程序和GSM信息处理程序组成。主程序完成系统的初始化、自检、人机交互操作和定位信息的处理等功能。
3.2GSM网络定位及通信
目前,中国移动和中国联通的移动通信网络既是语音通信网络,又是一个能提供丰富数据业务的网络,只要当地网络开通了位置服务功能,选用支持STK的SIM卡,即可通过STK命令得到位置信息。GSM网络通信主要以短消息的方式进行,包括短消息的接收和发送。在短消息的收发程序设计中运用AT命令来实现,其包括定位和监控信息的编码和解码、通信模式设定和联机测试、短消息的收发、收发数据的关键命令字的模式匹配。
3.3GPS信号定位
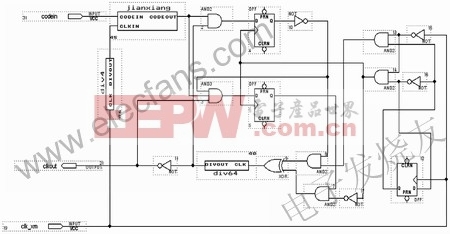
在进行信号稳定跟踪以前,首先需要实现信号的捕获来确定信号是否存在。通用接收机对载波信号的捕获通常采用一维的串行相关搜索。在本文所描述的高动态情况下,载波多普勒频偏最大为±14 kHz,若选择频率搜索步进为500 Hz,需要57次才能完成整个28 kHz带宽的搜索,显然非常耗费时间。而利用傅里叶变换将信号从时域变换到频域后,通过把原来的时域串行搜索变为频域并行搜索,进行1次并行搜索就能等同于传统方式下的57次串行搜索,大大节约了搜索时间。GPS定位流程如图3所示。本文引用地址://m.amcfsurvey.com/article/191177.htm

3.4 GPS信号追踪
完成信号捕获后,需要对信号进行精确稳定的跟踪,保证后续导航电文的正确解调。载波跟踪环由预检测积分器、环路鉴别器和滤波器组成,图4为GPS信号载波L1的跟踪环路框图。








评论