
基于FPGA的伺服驱动器分周比设计与实现
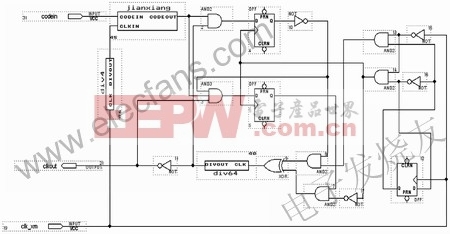
图3中,PA205,PB206分别是原始差分信号的A相、B相的输入引脚。信号经QDPF四倍频后将方向信号和脉冲信号输出给DF分频模块。经DF分频后将脉冲、方向信号输出给正交脉冲生成模块OSG,产生带相位的正交信号,最后从PA119,PB120反馈到CNC。下面对主要模块做分别介绍。
四倍频模块QDPF:正交信号的四倍频方法有很多种,在很多资料中都涉及,在此不做详细介绍。
分频模块DF按照初始化配置的分周比或者预先设定的分周比,对输入CLK_IN引脚的脉冲序列分频。内部的增、减计数器根据输入DIR_IN引脚的方向信号对输入脉冲进行增(DIR_IN=1)或减(DIR_IN=0)计数,增计数至正阈值时输出一个脉冲和正方向信号(DIR_OUT=1),减计数至负阈值是输出一个脉冲和负方向信号(DIR_OUT=0)。若计数值在正、负阈值之间时,不论电机反向,还是在阈值见抖动,即方向反复变化,输出方向信号都保持不变。这是能正确实现分频的关键,如果这一步处理不好,电机定位后可能会出现不断向CNC发脉冲的情况。以三分频为例,即计数器增计数至3后输出一个正脉冲(正方向信号+脉冲),计数器减计数至-3后输出一个负脉冲(负方向信号+脉冲)。计数值在(-3,3)时,计数器只对脉冲计数而不输出。对QDPF 的仿真结果如图4所示。
|
伺服电机相关文章:伺服电机工作原理
相关推荐
技术专区 |











评论