
MAX7456在可视倒车雷达中的应用

2 可视倒车雷达系统构成
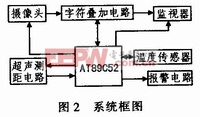
可视倒车雷达由视频后视系统和超声测距系统2大部分构成。视频后视系统负责对车后视频图像进行采集及显示,主要用于取代传统的汽车后视镜的功能,同时在本系统中还用来显示超声测距系统测得的车尾到障碍物的距离值。由单片机控制超声波测距系统完成对车后障碍物的测距,并完成将测距值在监视器上的显示操作。图2所示为可视倒车雷达系统框图,其中的字符叠加电路即为MAX74560。本文引用地址://m.amcfsurvey.com/article/197521.htm
2.1 超声波测距原理
考虑到汽车周围环境复杂、辅助倒车系统所需测量距离短及成本限制等原因,目前倒车雷达大都采用超声波进行测距。其基本原理是利用单片机控制超声波探头向车后发射一串超声波脉冲,然后测量该脉冲遇到障碍物后返回的时间t,在已知声波在空气中传播速度v时,根据公式:
![]()
即可计算出车尾到障碍物之间的距离。通常声波在空气中的传播速度受气温的影响较大,因此必需对气温进行测量,然后根据声波在空气中的传播速度公式:
![]()
进行修正,这样才能得到较准确的距离值。在单片机控制系统中,因为要兼顾运算速度和测量精度的关系,常使用式(2)的近似表达式
![]()
进行运算,这样就得到超声波倒车雷达的距离测量公式:
![]()
由该公式可计算出车尾到障碍物之间的距离。
2.2 测距电路
根据车载超声波雷达的工作特点及工作环境的要求,超声波测距电路在设计时必需遵循以下原则:1)考虑到车载环境恶劣及布线方便,超声波探头必需选用全密封防水、防振型收发两用专用探头;2)超声波探头通常使用压电陶瓷材料,其谐振频率为40 kHz,且起动时有一定的惰性,因此不能采用单脉冲驱动,必须采用10~20个群脉冲驱动才能取得较好效果;3)由于超声波基本沿直线传播,单个探头探测范围有限,通常需要3~4个探头才能完全覆盖车尾。根据以上原则所设计的超声波测距电路如图3所示。
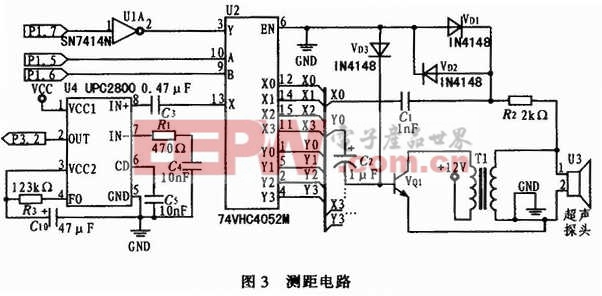
测距电路分发射和接收2部分,发射部分由SN7414、模拟电子开关HC4052的Y通道驱动4路超声波探头(图3中仅画出了其中一路)。超声波探头U3采用车用全密封防水、防振型收发两用探头,该探头的工作电压为120 V左右。为使其能够正常工作,设计了由VQ1、T1、C2和VD3组成的驱动器。VQ1工作在开关状态,T1为变比1:10的升压变压器,用于将12 V的驱动电压升压到120 V,VD3为C2提供放电通路。为防止在发射超声波时的高电压通过接收回路C1回串,烧毁HC4052模拟电子开关,在接收回路的输入端接入由R2、VD1和VD2组成的保护电路,将输入C4052的信号箝位在0.7 V。由于超声波探头接收到的正常回波信号通常只有几十毫伏,因此保护电路对回波信号无影响。
超声波测量采用循环工作方式,四路探头的选择由单片机通过P1.5、P1.6引脚控制HC4052来完成;测距时由单片机内部计数器控制,产生12个频率为40 kHz,占空比为50%的脉冲信号,由P1.7引脚发出,通过发射电路送到选定的超声波探头中。
接收回路由超声波探头U3、HC4052的X通道和UPC2800构成。UPC2800为红外接收器专用IC,内部集成有前置放大器、ABLC控制器、限幅放大器、带通滤波器、检波器和输出整形电路。其带通滤波器的中心频率可在30~80 kHz之间调整,正好覆盖40 kHz的超声波应用频率,因此本电路中用它完成对回波信号的放大、整形及检波。UPC2800的8引脚为信号输入脚。7引脚为前置放大器增益调整脚,其外接电阻可根据增益要求在0~1kΩ之间调整,串接的0.1μF电容用于隔直;3引脚为内部电源滤波电容接入脚,典型值为47μF;4引脚为内部带通滤波器中心频率调整脚,当外接电阻值为123 kΩ时,滤波器的中心频率为40kHz;6引脚为检波器滤波电容连接端子,其外接滤波电容典型值为O.1μF。检波完成后的脉冲信号由2引脚输出,送单片机的P3.2用作中断控制信号。

存储器相关文章:存储器原理
负离子发生器相关文章:负离子发生器原理 电容传感器相关文章:电容传感器原理 晶振相关文章:晶振原理 摄像头相关文章:摄像头原理 燃气报警器相关文章:燃气报警器原理






评论