
地面雷达数据处理系统设计
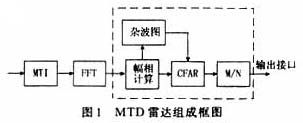
2 点迹形成的算法设计
由于雷达波束在连续扫描时,波束波瓣有一定宽度,至少有好几个脉冲连续扫到目标,每个脉冲都对应一个方位值,同一目标被捕捉到多次,多次捕获目标时的方位值都不同,这就造成了方位角的分裂程度较大。因此需要把一次扫描中同一目标的多个点迹凝聚成一个点迹。
先在距离上进行凝聚,得到水平波瓣内不同方位上的距离值;再在方位上凝聚,可获得惟一方位估计值;然后把距离值进行线性内插获得惟一的距离估计值。
(1)同一目标在距离上的凝聚处理,需将在距离上连续或间隔一个量化单元的点迹按照式(1)求取质心,将质心作为目标点迹的距离估计值:
式中:n为目标的点迹个数;Ri,Vi分别为第i个目标点迹的距离和回波幅度值。
(2)同一目标在方位上的凝聚处理,需将在方位上相邻的点迹按照式(2)求取质心,将质心作为目标点迹的方位估计值,此值即目标点迹的惟一估计值。
式中:n为目标的点迹个数;Ai,Vi分别为第i个目标点迹的方位和回波幅度值。
(3)用式(1)计算出目标在各个方位上的距离值,并不是目标点迹距离的惟一估计值,需要根据目标方位估计值落入的位置来求距离惟一的估计值。设方位估计值在距离估计值的第i和i+1点之间,求距离惟一估计值的内插公式为:
式中:Ro'为目标点迹距离的惟一估计值;Ao为目标点迹方位的惟一估计值;Ri+1,Ri,Ai+1,Ai分别为第i+1和i点迹的距离及方位值。此时即获得惟一的距离、方位估计值。
3 航迹处理的算法设计
单一而杂乱的目标点迹数据不利于操作员的判读,需要通过对目标点迹进行处理和预测后形成该目标航迹,通过相关和航迹质量管理等处理,降低虚警,提高雷达的综合检测能力。航迹的处理包括航迹的起始、航迹的预测、目标航迹和新目标点迹的相关、航迹的形成、航迹的终止。
3.1 航迹的起始
航迹起始的快速要求与较高的成功概率是相互矛盾的,滑窗检测法由于具有计算量小和可用蒙特卡洛法进行分析的优点,因而被许多系统采用。在航迹起始反应时间小于系统指标的要求下,可采用m/n逻辑滑窗检测法,即在n次扫描中至少应该有m次和该暂时航迹相关的目标点迹,常用准则如表1所示。本文引用地址://m.amcfsurvey.com/article/202431.htm

3.2 航迹预测和滤波算法
航迹预测是在本次航迹滤波值的基础上根据目标运动模型来估计目标未来的状态,滤波用来估计目标当前的运动参数(方位、距离、速度、运动方向、加速度等),把本次互联的目标点迹和预测航迹估计合并进行处理,以形成新的目标运动参数。
常用的滤波算法有最小二乘法、α—β滤波和Kal-man滤波算法。Kalman滤波是根据最小均方误差准则建立起来的估计方法,适用于有限观测间隔的非平稳过程。在目标机动运动时,Kalman滤波的性能就要优于其他滤波方法,基于Kalman滤波的各种自适应滤波与预测方法,包括重启滤波增益序列、增大输入噪声方差、增加目标状态维数、在跟踪滤波器之间切换等。








评论