
基于M D K RTX的COrtex—M3多任务应用设计


RL—RTX选择Cortex上定时器1产生周期性中断,相邻中断之间的时间就是时间片的长度。在其中断服务程序中进行任务调度,并判断执行了延迟函数的任务的延时时间是否到。这种周期性的中断形成了RL—RTX的时钟节拍。采用Cortex—M3的处理器STM32F103VB的CPU时钟频率为72 MHz,VPBDIV分频值为4,输出的时钟频率为18 MHz。系统推荐的时间片为1~lOO ms。
使用RL—RTX,包含以下几个步骤:
第1步,由于RL—RTX集成在MDK开发套件中,在使用MDK创建工程后,需要在工程中添加RTX内核选项。选择Project→Options for Target,在Operating下拉框中选择RTX内核,使得在编译时把RL—RTX所需的库编译进去。
第2步,在嵌入式应用程序的开发中使用RL—RTX内核,须对其进行配置。复制\Keil\ARM\Startup目录下RTX_Config.c文件到工程文件夹并添加到工程中。该文件中,部分配置参数说明如表3所列。

基于Cortex—M3平台的超温报警器,可以设计3个任务并发,分别进行数据采集、数据处理和数据显示。3个任务较小,系统安排的任务栈足够使用,栈的容量以32位无符号整型定义,容量为64字。选择硬件平台片上定时器1。
DSl8820具有300 ms的更新速率,在采集数据过程中,通过多次采集取平均值,数据采集任务执行的时间为30 ms,数据处理任务执行时间为40 ms,数据显示任务执行时间为20 ms。根据公式,对响应时间的要求:t(响应时间)=N(进程数目)×q(时间片)。总体响应时间为90 ms,进程数目为3,因此时间片设置为30 ms合适。在任务OS_IDLE_DEMON()中添加休眠代码,空闲时系统休眠,降低功耗。
第3步,复制\Keil\ARM\Startup下Retarget.c文件到工程文件夹中,并添加到工程中。
修改文件,使其包含如下内容:

该文件的目的是避免半主机方式软件中断,因为这时所有中断都由RL—RTX统一管理。半主机是用于ARM目标的一种机制,可将来自应用程序代码的输入/输出请求传送至运行调试器的主机。它由一组已定义的SWI操作来实现。库函数调用相应的SWI(软件中断),然后调试代理程序处理SWI异常,并提供所需的与主机之间的通信。
4 应用设计
4.1多任务应用设计
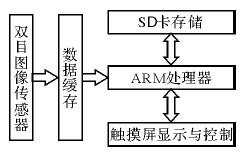
根据图1所示的最小系统框图,采用由表及里(out—side-in approach)分解应用的方法设计多任务。该应用的上下文框图如图3所示,中间的圈表示软件应用,矩形框表示应用的输入和输出设备。箭头标有具体含义名,表示输入和输出通信的流程。

根据上下文框图以及避免“资源冲突”原则,将对同一个外设的访问放在同一个设备中,无论何时切换任务,都不会对任何独立的“外设”造成影响。
将应用分解为4个任务,RL—RTX的第一个任务必须是系统任务Init Task,该任务用来初始化其他3个任务,任务创建完毕后,3个任务都处于READY状态;第2个任务t_phase_ADC Task用来读取A/D采样的数据;第3个任务t_phase_DEA Task用来处理采样的数据;第4个任务t_phase_DIS Task用来将数据送到LCD液晶屏上,显示、控制LED灯闪烁和蜂鸣器高频报警。图4显示了任务触发的流程。
定义任务:


使用os_tsk_create创建任务t_phase_ADC、t_phase_DEA、t_phase_DIS。
os_tsk_delete_self删除自身任务,实现任务切换。任务的创建和初始化是在主函数中定义的:

任务初始化完毕后,3个任务都处于就绪状态。t_phase_ADC任务用来采样,多次采样取平均值,通过给任务t_phase_DEA发信号signal_func(t_phase_DEA),唤醒t_phase_DEA任务。

os_evt_wait_and进行控制。该任务判断采样的数据是否在警戒温度范围内,如果出现温度异常,置标志位为1。执行完自身任务后,通过signal_func(t_phase_DIS),将唤醒t_phase_DIS任务。

t_phase_DIS任务用来在LCD液晶屏上显示温度值。如果发现标志位为1,则LED灯闪烁和蜂鸣器高频报警。
4.2 应用设计测试
采用基本RMA可调度性测试。式1用来完成系统的基本RMA可调度性测试。

这里:Ci为与周期性任务i相关的最坏执行时间,Ti为与任务i相关的周期,n为任务的个数。
U(n)是利用系数,式1的右边是理论处理器利用率的上界。如果给定一组任务,其处理器利用率小于理论利用率上界,则这组任务是可调度的。U的值随n的增加而下降;当n的值为无限时,最终收敛于69%。
表4总结了使用RMA进行调度的3个任务的特性。

使用式1,该应用设计处理器利用率计算如下:

应用设计总的利用率是27.42%,低于78%的理论边界。此4个任务的系统是可调度的,该应用设计是成功的。
结 语
本文描述了如何在Cortex—M3上使用MDKRL—RTX的方法,并给出了一个简单的多任务应用设计。可以看出多任务的程序设计被大大简化了,它不但满足多个任务的时间要求,降低了开发难度,而且程序的可读性和可维护性也有了很大的提高。利用MDK RL—RTX构建的嵌入式工业控制系统具有成本低、性能高等特点,应用广泛,有着良好的发展前景。









评论